正交啁啾分复用技术:基于菲涅尔变换的通信系统设计
X. Ouyang and J. Zhao, “Orthogonal Chirp Division Multiplexing,” in IEEE Transactions on Communications, vol. 64, no. 9, pp. 3946-3957, Sept. 2016, doi: 10.1109/TCOMM.2016.2594792.
1. 引言与研究背景
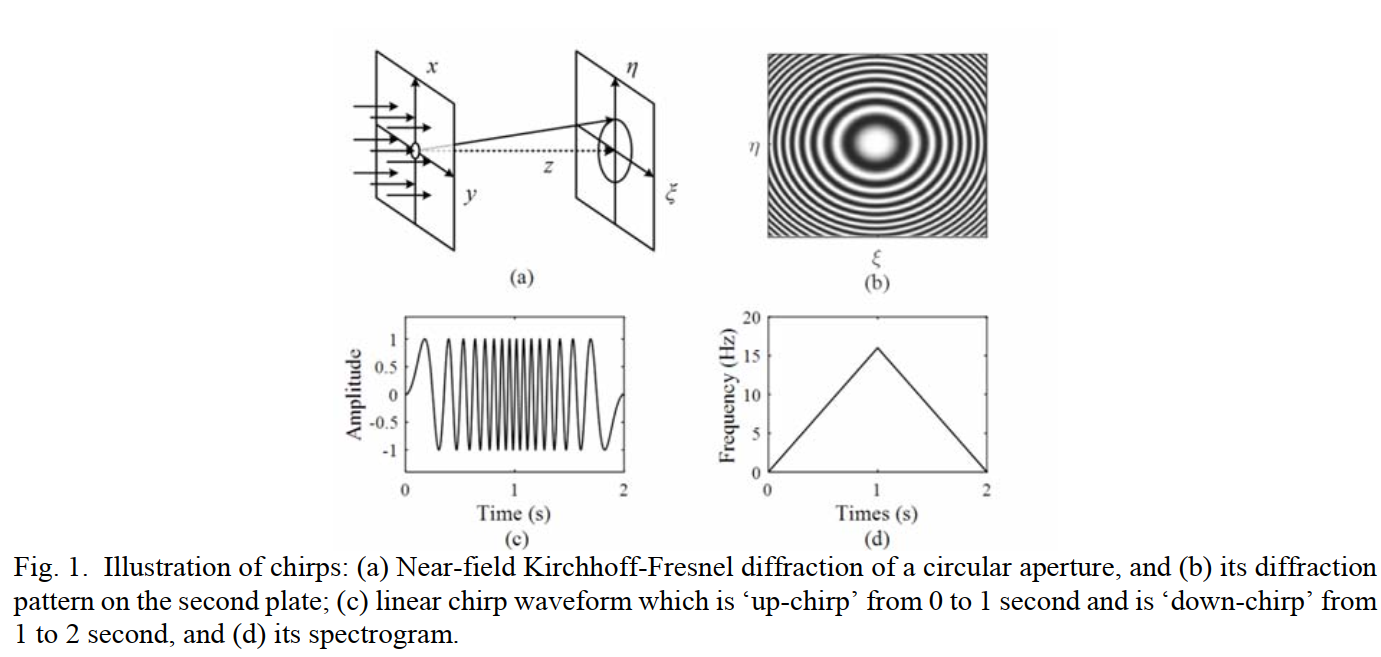
啁啾波形在现代雷达和通信系统中具有举足轻重的地位,其独特的脉冲压缩和扩频能力使其成为许多应用的首选。啁啾信号本质上是一种频率随时间线性变化的信号,这种特性在自然界和工程应用中广泛存在。从光学中的菲涅尔衍射到雷达系统的脉冲压缩,从扩频通信到超宽带传输,啁啾信号的应用无处不在。
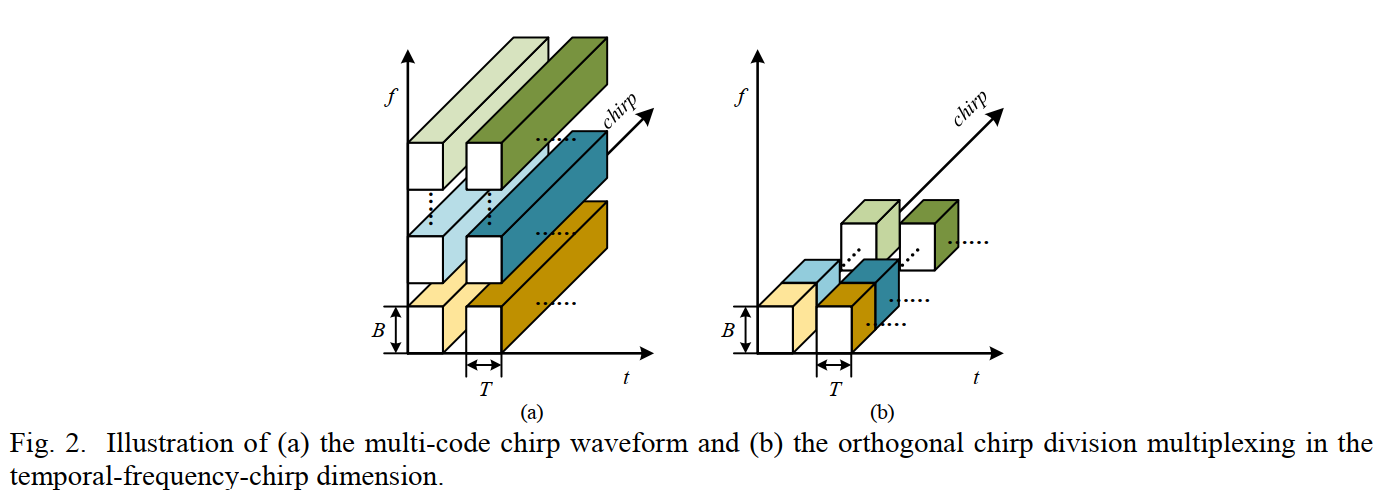
传统的啁啾扩频(CSS)系统虽然提供了良好的抗干扰能力和多径分辨能力,但其频谱效率相对较低。在给定的时间周期T T T B B B
本文提出的正交啁啾分复用(OCDM)技术旨在解决这一问题。通过在相同的时间周期和带宽内正交复用多个啁啾波形,OCDM能够显著提高频谱效率。该技术的理论基础是菲涅尔变换,正如傅里叶变换构成了OFDM的数学基础一样。
2. 菲涅尔变换的理论基础
2.1 连续菲涅尔变换
菲涅尔变换起源于经典光学,是描述近场光学衍射行为的数学工具。考虑图1所示的情况:当波长为λ \lambda λ λ \lambda λ z z z
图1描述 :图1展示了近场Kirchhoff-Fresnel衍射现象。(a)部分显示了圆形孔径的衍射几何配置,其中入射平面波通过第一个平板上的圆孔,在距离z z z
菲涅尔变换的数学表达式为:
s ^ ( τ ) = F a { s ( t ) } ( τ ) = e − j π 4 a ∫ − ∞ ∞ s ( t ) e j π a ( τ − t ) 2 d t \hat{s}(\tau) = \mathcal{F}_a\{s(t)\}(\tau) = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}} \int_{-\infty}^{\infty} s(t)e^{j\frac{\pi}{a}(\tau-t)^2} dt
s ^ ( τ ) = F a { s ( t ) } ( τ ) = a e − j 4 π ∫ − ∞ ∞ s ( t ) e j a π ( τ − t ) 2 d t
其中F a { ⋅ } \mathcal{F}_a\{\cdot\} F a { ⋅ } a a a a = λ z a = \lambda z a = λ z
e j π a ( τ − t ) 2 = e j π τ 2 a ⋅ e − j 2 π τ t a ⋅ e j π t 2 a e^{j\frac{\pi}{a}(\tau-t)^2} = e^{j\frac{\pi\tau^2}{a}} \cdot e^{-j\frac{2\pi\tau t}{a}} \cdot e^{j\frac{\pi t^2}{a}}
e j a π ( τ − t ) 2 = e j a π τ 2 ⋅ e − j a 2 π τ t ⋅ e j a π t 2
这表明菲涅尔变换可以视为输入信号乘以二次相位因子后进行的调制傅里叶变换。
菲涅尔变换还可以表示为卷积形式:
s ^ ( τ ) = s ( τ ) ∗ φ a ( τ ) \hat{s}(\tau) = s(\tau) * \varphi_a(\tau)
s ^ ( τ ) = s ( τ ) ∗ φ a ( τ )
其中核函数为:
φ a ( t ) = e j π 4 a e j π t 2 a \varphi_a(t) = \frac{e^{j\frac{\pi}{4}}}{\sqrt{a}} e^{j\frac{\pi t^2}{a}}
φ a ( t ) = a e j 4 π e j a π t 2
2.2 菲涅尔变换的卷积定理
菲涅尔变换具有独特的卷积性质,这是Gori在1994年强调的"被忽视"但重要的性质:
F a { h ( t ) ∗ s ( t ) } = h ^ ( τ ) ∗ s ^ ( τ ) = h ( τ ) ∗ s ^ ( τ ) \mathcal{F}_a\{h(t) * s(t)\} = \hat{h}(\tau) * \hat{s}(\tau) = h(\tau) * \hat{s}(\tau)
F a { h ( t ) ∗ s ( t ) } = h ^ ( τ ) ∗ s ^ ( τ ) = h ( τ ) ∗ s ^ ( τ )
这个性质表明,两个函数卷积的菲涅尔变换等于其中一个函数与另一个函数菲涅尔变换的卷积。这与傅里叶变换的卷积定理(卷积变为乘积)有本质区别。
2.3 离散菲涅尔变换
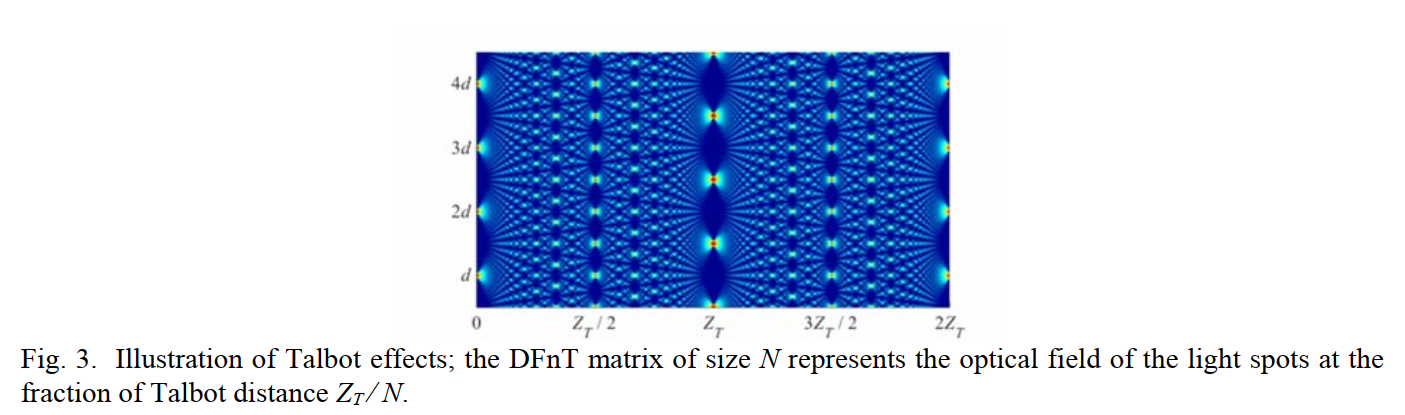
离散菲涅尔变换与塔尔博特效应密切相关。塔尔博特效应是指周期性光栅在特定距离处自成像的现象,如图3所示。
图3描述 :图3展示了塔尔博特效应的示意图。当光通过周期性光栅后,在塔尔博特距离Z T Z_T Z T Z T / N Z_T/N Z T / N
N × N N \times N N × N Φ \Phi Φ
Φ ( m , n ) = 1 N e − j π 4 × { e j π ( m − n ) 2 N N ≡ 0 ( m o d 2 ) e j π N ( m + 1 2 − n ) 2 N ≡ 1 ( m o d 2 ) \Phi(m,n) = \frac{1}{\sqrt{N}} e^{-j\frac{\pi}{4}} \times \begin{cases}
e^{j\frac{\pi(m-n)^2}{N}} & N \equiv 0\pmod{2} \\
e^{j\frac{\pi}{N}\left(m+\frac{1}{2}-n\right)^2} & N \equiv 1\pmod{2}
\end{cases} Φ ( m , n ) = N 1 e − j 4 π × { e j N π ( m − n ) 2 e j N π ( m + 2 1 − n ) 2 N ≡ 0 ( m o d 2 ) N ≡ 1 ( m o d 2 )
DFnT具有循环卷积性质:对于循环卷积r = h ⊛ s \mathbf{r} = \mathbf{h} \circledast \mathbf{s} r = h ⊛ s
r ^ = Φ r = H s ^ = S h ^ \hat{\mathbf{r}} = \Phi\mathbf{r} = \mathbf{H}\hat{\mathbf{s}} = \mathbf{S}\hat{\mathbf{h}}
r ^ = Φ r = H s ^ = S h ^
其中H \mathbf{H} H S \mathbf{S} S h \mathbf{h} h s \mathbf{s} s
3. 正交啁啾分复用系统设计
3.1 啁啾信号的基本特性
频率调制的啁啾信号可以表示为:
ψ ( t ) = e j ( α t 2 + ϕ 0 ) \psi(t) = e^{j(\alpha t^2 + \phi_0)}
ψ ( t ) = e j ( α t 2 + ϕ 0 )
其瞬时频率为:
f ( t ) = 1 2 π d d t [ α t 2 + ϕ 0 ] = α t 2 π f(t) = \frac{1}{2\pi}\frac{d}{dt}[\alpha t^2 + \phi_0] = \frac{\alpha t}{2\pi}
f ( t ) = 2 π 1 d t d [ α t 2 + ϕ 0 ] = 2 π α t
对于时间限制在[ 0 , T ] [0, T] [ 0 , T ] B B B α \alpha α T T T
B = α T 2 π B = \frac{\alpha T}{2\pi}
B = 2 π α T
时间带宽积B T = α T 2 2 π BT = \frac{\alpha T^2}{2\pi} B T = 2 π α T 2
3.2 正交啁啾波形的构造
为了在OCDM中应用菲涅尔变换,需要将光学中的空间塔尔博特效应适配到时域。定义时间塔尔博特距离:
Z T = T 2 λ Z_T = \frac{T^2}{\lambda}
Z T = λ T 2
对于N N N z = Z T / N z = Z_T/N z = Z T / N a = T 2 / N a = T^2/N a = T 2 / N
ψ 0 ( t ) = Π T ( t ) ⋅ φ a ∗ ( t ) ∣ a = T 2 / N = { e j π 4 e − j π N t 2 T 2 0 ≤ t < T 0 otherwise \psi_0(t) = \Pi_T(t) \cdot \varphi_a^*(t)|_{a=T^2/N} = \begin{cases}
e^{j\frac{\pi}{4}}e^{-j\frac{\pi N t^2}{T^2}} & 0 \leq t < T \\
0 & \text{otherwise}
\end{cases} ψ 0 ( t ) = Π T ( t ) ⋅ φ a ∗ ( t ) ∣ a = T 2 / N = { e j 4 π e − j T 2 π N t 2 0 0 ≤ t < T otherwise
第k k k
ψ k ( t ) = Π T ( t ) ⋅ e j π 4 e − j π N T 2 ( t − k T N ) 2 , 0 ≤ t < T \psi_k(t) = \Pi_T(t) \cdot e^{j\frac{\pi}{4}}e^{-j\frac{\pi N}{T^2}\left(t-k\frac{T}{N}\right)^2}, \quad 0 \leq t < T
ψ k ( t ) = Π T ( t ) ⋅ e j 4 π e − j T 2 π N ( t − k N T ) 2 , 0 ≤ t < T
图2描述 :图2对比了多码啁啾系统和OCDM系统的时频资源利用。(a)部分展示了传统多码系统,其中不同啁啾在频域上分离以避免干扰,每个啁啾占据部分带宽。(b)部分展示了OCDM系统的创新之处:多个啁啾在相同的时间和带宽内正交复用,通过啁啾维度的正交性避免相互干扰,显著提高了频谱效率。
3.3 正交性证明
啁啾波形的正交性可通过以下积分验证:
∫ 0 T ψ m ∗ ( t ) ψ n ( t ) d t = ∫ 0 T e j π N T 2 [ ( t − m T N ) 2 − ( t − n T N ) 2 ] d t \int_0^T \psi_m^*(t)\psi_n(t)dt = \int_0^T e^{j\frac{\pi N}{T^2}\left[\left(t-m\frac{T}{N}\right)^2 - \left(t-n\frac{T}{N}\right)^2\right]} dt
∫ 0 T ψ m ∗ ( t ) ψ n ( t ) d t = ∫ 0 T e j T 2 π N [ ( t − m N T ) 2 − ( t − n N T ) 2 ] d t
= ∫ 0 T e j 2 π N ( m − n ) t T 2 e j π ( n 2 − m 2 ) N d t = δ ( m − n ) = \int_0^T e^{j\frac{2\pi N(m-n)t}{T^2}}e^{j\frac{\pi(n^2-m^2)}{N}} dt = \delta(m-n)
= ∫ 0 T e j T 2 2 π N ( m − n ) t e j N π ( n 2 − m 2 ) d t = δ ( m − n )
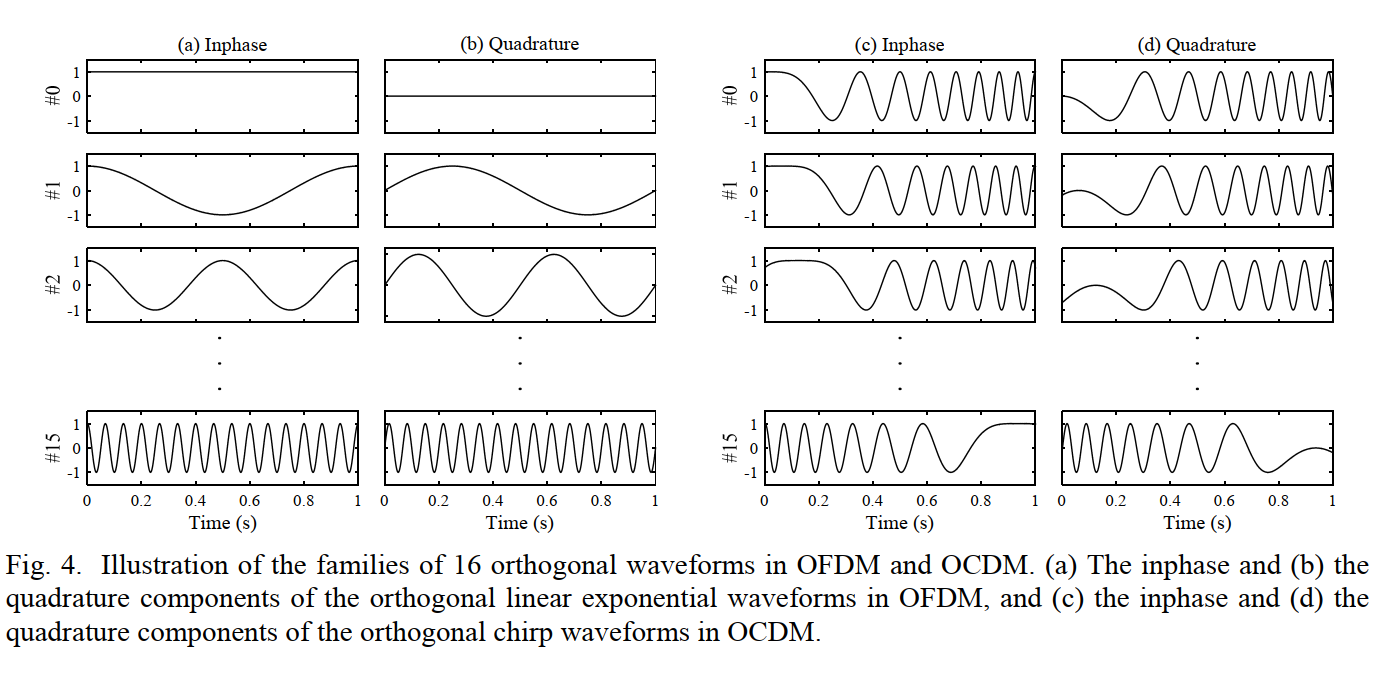
图4描述 :图4对比展示了OFDM和OCDM中的正交波形族。左侧(a)和(b)显示了OFDM中16个正交线性指数波形的实部和虚部,这些波形在频域正交。右侧©和(d)显示了OCDM中16个正交啁啾波形的实部和虚部,这些二次指数波形在啁啾维度正交。可以观察到OCDM波形的频率随时间变化的特征。
3.4 OCDM信号的合成与解调
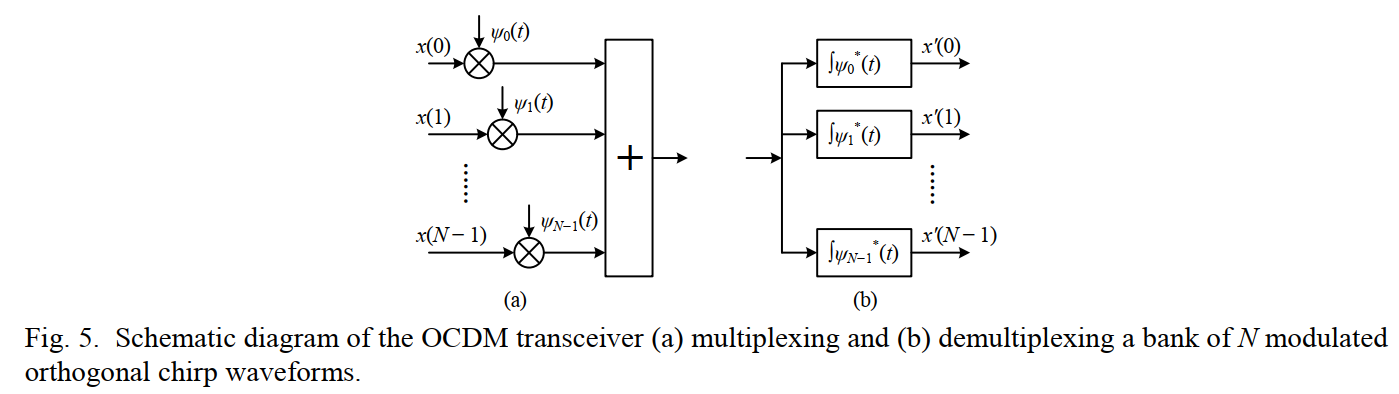
在OCDM系统中,第k k k x ( k ) x(k) x ( k ) k k k
s ( t ) = ∑ k = 0 N − 1 x ( k ) ψ k ( t ) , 0 ≤ t < T s(t) = \sum_{k=0}^{N-1} x(k)\psi_k(t), \quad 0 \leq t < T
s ( t ) = k = 0 ∑ N − 1 x ( k ) ψ k ( t ) , 0 ≤ t < T
图5描述 :图5展示了OCDM收发机的原理框图。(a)部分是发射机,多个调制符号x ( 0 ) x(0) x ( 0 ) x ( N − 1 ) x(N-1) x ( N − 1 ) ψ 0 ( t ) \psi_0(t) ψ 0 ( t ) ψ N − 1 ( t ) \psi_{N-1}(t) ψ N − 1 ( t ) N N N
通过第m m m
x ′ ( m ) = ∫ 0 T s ( t ) ψ m ∗ ( t ) d t = ∑ k = 0 N − 1 x ( k ) ∫ 0 T ψ k ( t ) ψ m ∗ ( t ) d t = x ( m ) x'(m) = \int_0^T s(t)\psi_m^*(t)dt = \sum_{k=0}^{N-1}x(k)\int_0^T \psi_k(t)\psi_m^*(t)dt = x(m)
x ′ ( m ) = ∫ 0 T s ( t ) ψ m ∗ ( t ) d t = k = 0 ∑ N − 1 x ( k ) ∫ 0 T ψ k ( t ) ψ m ∗ ( t ) d t = x ( m )
4. OCDM系统的数字实现
4.1 离散化过程
对连续时间OCDM信号在t = n T N t = n\frac{T}{N} t = n N T N N N
s ( n ) = s ( t ) ∣ t = n T N = ∑ k = 0 N − 1 x ( k ) ψ k ( n T N ) s(n) = s(t)|_{t=n\frac{T}{N}} = \sum_{k=0}^{N-1}x(k)\psi_k\left(n\frac{T}{N}\right)
s ( n ) = s ( t ) ∣ t = n N T = k = 0 ∑ N − 1 x ( k ) ψ k ( n N T )
= e j π 4 N ∑ k = 0 N − 1 x ( k ) e − j π ( n − k ) 2 N = \frac{e^{j\frac{\pi}{4}}}{\sqrt{N}}\sum_{k=0}^{N-1}x(k)e^{-j\frac{\pi(n-k)^2}{N}}
= N e j 4 π k = 0 ∑ N − 1 x ( k ) e − j N π ( n − k ) 2
这正是逆离散菲涅尔变换(IDFnT)的形式。对于N N N
s ( n ) = e j π 4 N ∑ k = 0 N − 1 x ( k ) e − j π N ( n − k + 1 2 ) 2 s(n) = \frac{e^{j\frac{\pi}{4}}}{\sqrt{N}}\sum_{k=0}^{N-1}x(k)e^{-j\frac{\pi}{N}\left(n-k+\frac{1}{2}\right)^2}
s ( n ) = N e j 4 π k = 0 ∑ N − 1 x ( k ) e − j N π ( n − k + 2 1 ) 2
4.2 矩阵表示
用矩阵形式表示:
s = Φ H x \mathbf{s} = \Phi^H\mathbf{x}
s = Φ H x
其中x = [ x ( 0 ) , x ( 1 ) , . . . , x ( N − 1 ) ] T \mathbf{x} = [x(0), x(1), ..., x(N-1)]^T x = [ x ( 0 ) , x ( 1 ) , . . . , x ( N − 1 ) ] T Φ H \Phi^H Φ H
x ′ = Φ s = Φ Φ H x = x \mathbf{x}' = \Phi\mathbf{s} = \Phi\Phi^H\mathbf{x} = \mathbf{x}
x ′ = Φ s = Φ Φ H x = x
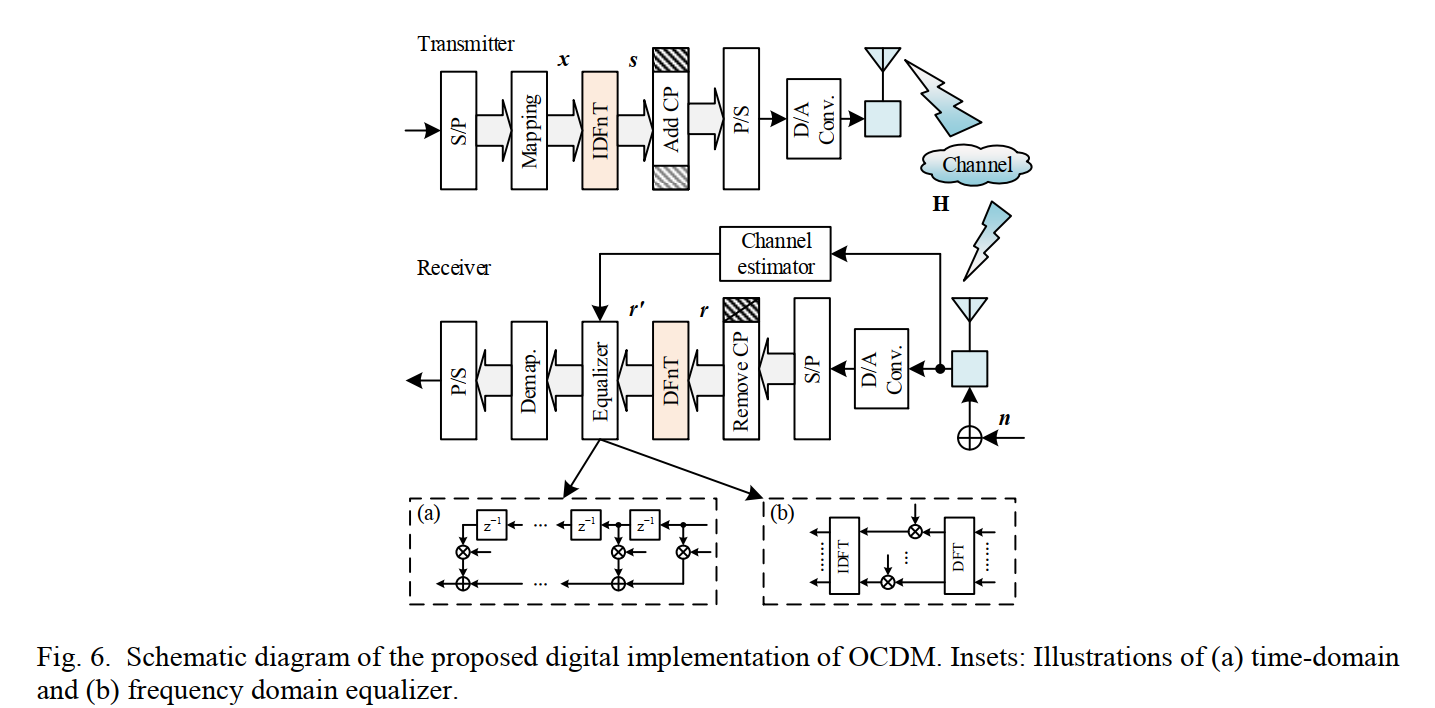
图6描述 :图6展示了OCDM系统的完整数字实现框图。发射端包括映射、串并转换、IDFnT、添加循环前缀、并串转换和数模转换。接收端包括相应的逆操作,以及关键的均衡器模块。插图(a)显示了时域均衡器的横向滤波器结构,(b)显示了频域均衡器,通过DFT-IDFT变换在频域进行单抽头均衡。
5. LTI信道下的传输分析
5.1 信道模型
考虑线性时不变(LTI)或准静态信道,信道在一个OCDM块内保持不变。使用循环前缀(CP)避免符号间干扰,接收信号为:
r = H s + n = H Φ H x + n \mathbf{r} = \mathbf{Hs} + \mathbf{n} = \mathbf{H}\Phi^H\mathbf{x} + \mathbf{n}
r = H s + n = H Φ H x + n
其中H \mathbf{H} H h = [ h ( 0 ) , h ( 1 ) , . . . , h ( L − 1 ) , 0 , . . . , 0 ] T \mathbf{h} = [h(0), h(1), ..., h(L-1), 0, ..., 0]^T h = [ h ( 0 ) , h ( 1 ) , . . . , h ( L − 1 ) , 0 , . . . , 0 ] T
5.2 DFnT域的信道效应
在接收端执行DFnT:
r ′ = Φ r = Φ H Φ H x + Φ n \mathbf{r}' = \Phi\mathbf{r} = \Phi\mathbf{H}\Phi^H\mathbf{x} + \Phi\mathbf{n}
r ′ = Φ r = Φ H Φ H x + Φ n
根据DFnT的循环卷积性质:
r ′ = H x + Φ n \mathbf{r}' = \mathbf{H}\mathbf{x} + \Phi\mathbf{n}
r ′ = H x + Φ n
这表明啁啾波形对信道是"透明"的——就像符号直接通过信道传输,而未经啁啾调制。
5.3 高效均衡算法
基于DFnT的特征分解,提出高效的频域均衡算法。将接收信号变换到频域:
y = F r = F H Φ H x + F n \mathbf{y} = \mathbf{Fr} = \mathbf{FH}\Phi^H\mathbf{x} + \mathbf{Fn}
y = F r = F H Φ H x + F n
利用I = F H F \mathbf{I} = \mathbf{F}^H\mathbf{F} I = F H F
y = F H F H F Φ H F H F x + w = Λ Γ H F x + w \mathbf{y} = \mathbf{FHF}^H\mathbf{F}\Phi^H\mathbf{F}^H\mathbf{Fx} + \mathbf{w} = \mathbf{\Lambda}\mathbf{\Gamma}^H\mathbf{Fx} + \mathbf{w}
y = F H F H F Φ H F H F x + w = Λ Γ H F x + w
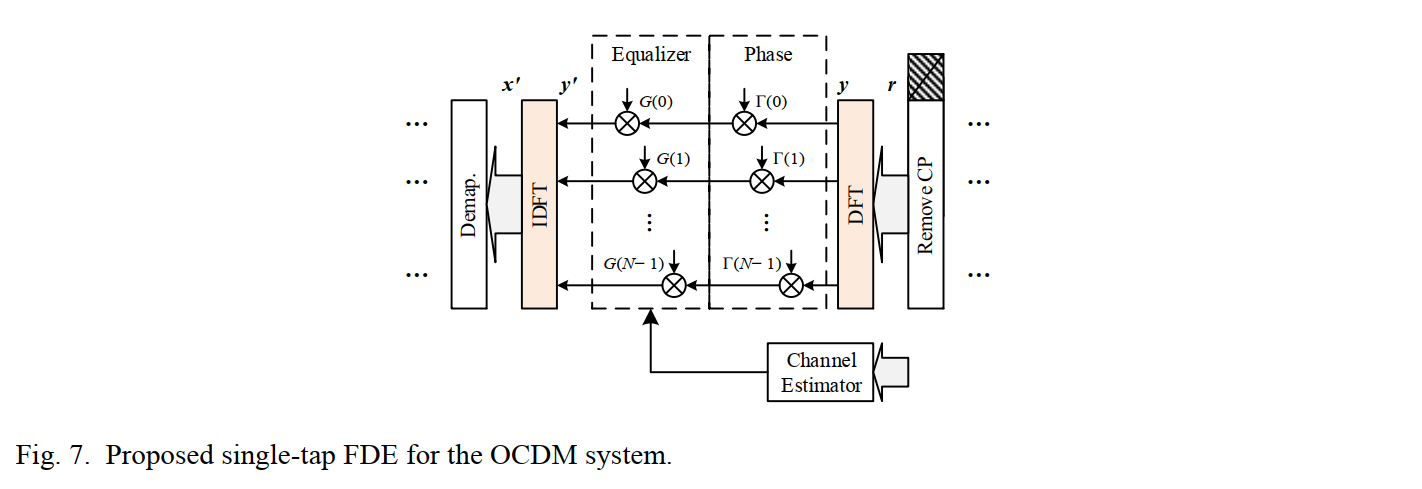
其中Λ \mathbf{\Lambda} Λ Γ \mathbf{\Gamma} Γ k k k
Γ ( k ) = { e − j π k 2 N N ≡ 0 ( m o d 2 ) e − j π N ( k + 1 2 ) 2 N ≡ 1 ( m o d 2 ) \Gamma(k) = \begin{cases}
e^{-j\frac{\pi k^2}{N}} & N \equiv 0\pmod{2} \\
e^{-j\frac{\pi}{N}\left(k+\frac{1}{2}\right)^2} & N \equiv 1\pmod{2}
\end{cases} Γ ( k ) = { e − j N π k 2 e − j N π ( k + 2 1 ) 2 N ≡ 0 ( m o d 2 ) N ≡ 1 ( m o d 2 )
图7描述 :图7展示了提出的单抽头频域均衡算法。接收信号经过DFT变换到频域,然后通过相位补偿消除Γ \Gamma Γ
均衡后的信号:
y ′ = G Γ y = G Λ F x + G Γ w \mathbf{y}' = \mathbf{G}\mathbf{\Gamma}\mathbf{y} = \mathbf{G}\mathbf{\Lambda}\mathbf{Fx} + \mathbf{G}\mathbf{\Gamma}\mathbf{w}
y ′ = G Γ y = G Λ F x + G Γ w
对于ZF均衡:G ( k ) = Λ − 1 ( k ) G(k) = \Lambda^{-1}(k) G ( k ) = Λ − 1 ( k )
G MMSE ( k ) = Λ ∗ ( k ) ∣ Λ ( k ) ∣ 2 + ρ − 1 G_{\text{MMSE}}(k) = \frac{\Lambda^*(k)}{|\Lambda(k)|^2 + \rho^{-1}}
G MMSE ( k ) = ∣ Λ ( k ) ∣ 2 + ρ − 1 Λ ∗ ( k )
6. 系统实现与兼容性
6.1 与OFDM的关系
菲涅尔变换核可以分解为傅里叶变换核和二次相位项:
φ a ( f , t ) = e − j π 4 a e j π f 2 a e − j 2 π f t + j π t 2 a \varphi_a(f,t) = e^{-j\frac{\pi}{4}a}e^{j\frac{\pi f^2}{a}}e^{-j2\pi ft+j\frac{\pi t^2}{a}}
φ a ( f , t ) = e − j 4 π a e j a π f 2 e − j 2 π f t + j a π t 2
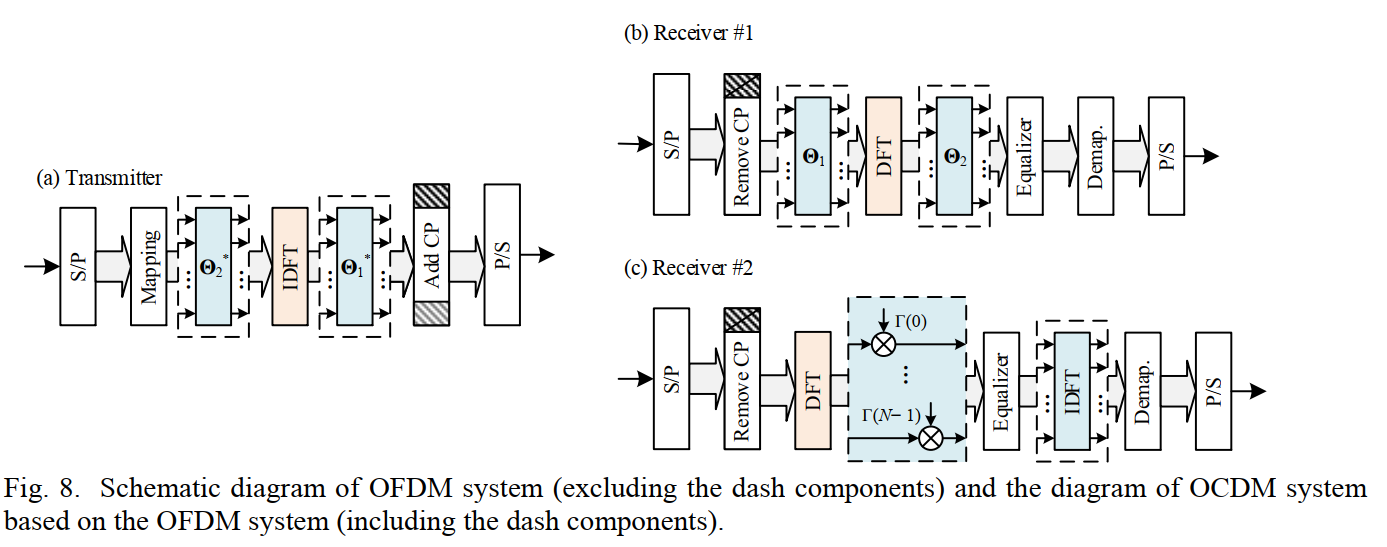
在离散情况下,DFnT可通过三步实现:
乘以啁啾相位Θ 2 ( n ) = e − j θ 2 ( n ) \Theta_2(n) = e^{-j\theta_2(n)} Θ 2 ( n ) = e − j θ 2 ( n )
执行DFT
乘以啁啾相位Θ 1 ( m ) = e − j θ 1 ( m ) \Theta_1(m) = e^{-j\theta_1(m)} Θ 1 ( m ) = e − j θ 1 ( m )
其中:
θ 1 ( m ) = { e j π m 2 N N ≡ 0 ( m o d 2 ) e j π N ( m + 1 2 ) 2 N ≡ 1 ( m o d 2 ) \theta_1(m) = \begin{cases}
e^{j\frac{\pi m^2}{N}} & N \equiv 0\pmod{2} \\
e^{j\frac{\pi}{N}\left(m+\frac{1}{2}\right)^2} & N \equiv 1\pmod{2}
\end{cases} θ 1 ( m ) = { e j N π m 2 e j N π ( m + 2 1 ) 2 N ≡ 0 ( m o d 2 ) N ≡ 1 ( m o d 2 )
θ 2 ( n ) = { e j π n 2 N N ≡ 0 ( m o d 2 ) e j π N ( n − 1 2 ) 2 N ≡ 1 ( m o d 2 ) \theta_2(n) = \begin{cases}
e^{j\frac{\pi n^2}{N}} & N \equiv 0\pmod{2} \\
e^{j\frac{\pi}{N}\left(n-\frac{1}{2}\right)^2} & N \equiv 1\pmod{2}
\end{cases} θ 2 ( n ) = { e j N π n 2 e j N π ( n − 2 1 ) 2 N ≡ 0 ( m o d 2 ) N ≡ 1 ( m o d 2 )
图8描述 :图8展示了如何将OCDM集成到现有OFDM系统中。标准OFDM系统(不含虚线框部分)通过添加虚线框中的相位旋转模块即可实现OCDM。(a)发射机在IDFT前后添加相位旋转Θ 1 ∗ \Theta_1^* Θ 1 ∗ Θ 2 \Theta_2 Θ 2
6.2 算法复杂度分析
表I总结了OCDM相对于OFDM的额外算法复杂度(以每符号复数乘法计):
模块
接收机#1(TDE)
接收机#1(FDE)
接收机#2
发射机
2
2
2
接收机
L + 2 L+2 L + 2 log 2 N + 2 \log_2 N + 2 log 2 N + 2 0.5 log 2 N 0.5\log_2 N 0 . 5 log 2 N
其中L L L N N N
7. 仿真结果与分析
7.1 仿真参数
仿真参数:系统带宽10 MHz,1024个啁啾,调制方式从4-QAM到64-QAM。考虑两种信道模型:
10径等增益瑞利衰落信道,最大时延扩展5.4 μs
EVA信道模型(表II给出功率延迟谱)
7.2 性能分析
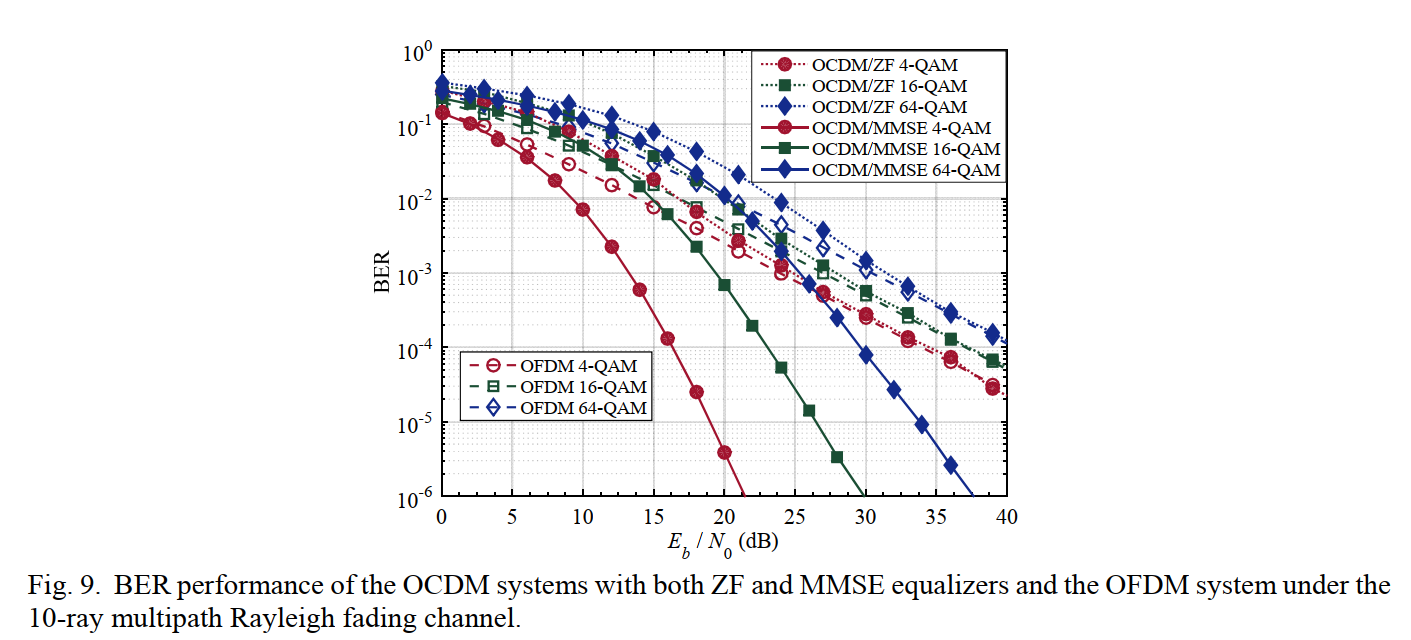
图9描述 :图9展示了在10径瑞利衰落信道下的误比特率(BER)性能。可以观察到:使用ZF均衡的OCDM在低SNR区域性能较差(噪声增强效应),但随SNR增加逐渐接近OFDM。使用MMSE均衡的OCDM在高SNR区域明显优于OFDM,这得益于其利用多径分集的能力。不同调制阶数(4/16/64-QAM)表现出相似趋势,高阶调制对噪声更敏感。
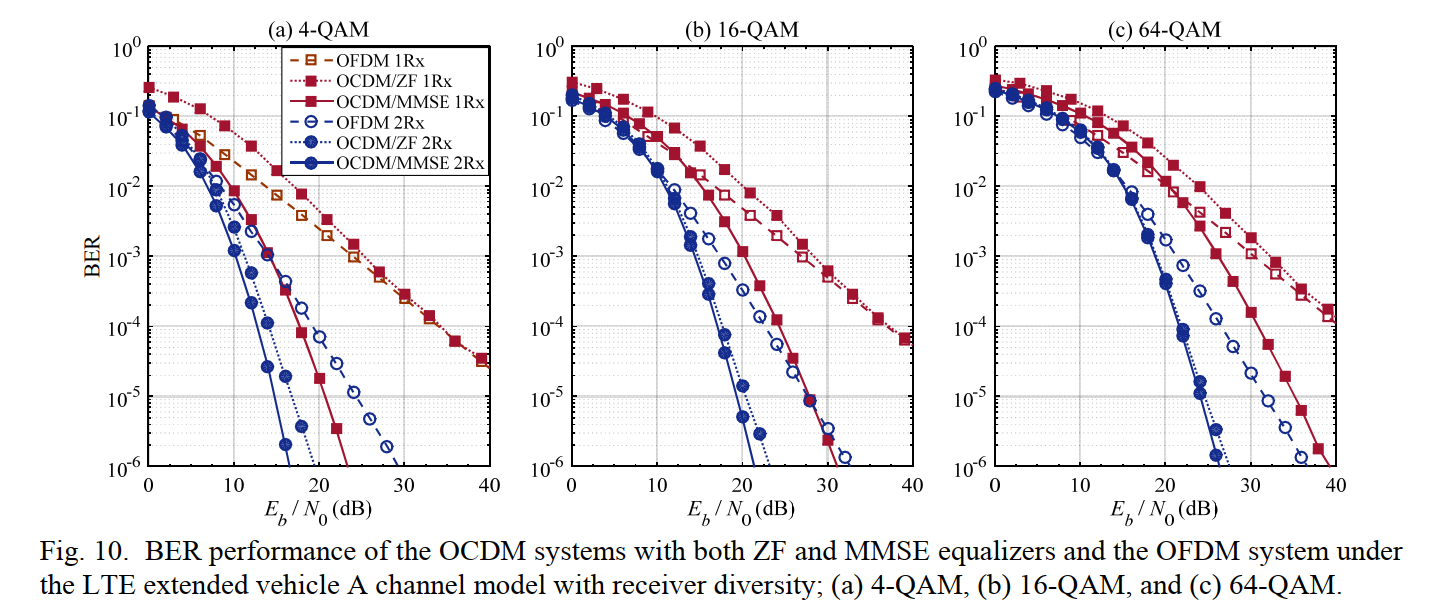
图10描述 :图10展示了EVA信道下采用接收分集的性能。(a)4-QAM、(b)16-QAM、©64-QAM的结果表明:双天线接收分集(2Rx)显著改善了OCDM的性能,即使ZF均衡也能超越OFDM。空间分集有效抑制了线性均衡器的噪声增强,使OCDM的多径分集优势得以充分发挥。
仿真结果表明:
MMSE均衡的OCDM利用多径分集,在高SNR区域优于OFDM
空间分集能有效抑制噪声增强效应
OCDM特别适合多径丰富的无线信道环境
8. 结论
本文提出的OCDM技术通过在相同时频资源内正交复用多个啁啾波形,显著提高了频谱效率。菲涅尔变换为OCDM提供了坚实的理论基础,其独特的卷积性质使得啁啾波形对色散信道"透明"。提出的高效均衡算法基于DFnT的特征分解,降低了计算复杂度。OCDM与现有OFDM系统高度兼容,可通过简单的相位旋转操作实现。仿真结果验证了OCDM在多径信道下的优越性能,特别是结合空间分集技术时。这些特性使OCDM成为高速无线通信系统的一个有吸引力的选择。
附录A:菲涅尔变换
A.1 菲涅尔变换与线性正则变换的关系
菲涅尔变换是线性正则变换(LCT)的特例。一般的LCT定义为:
L ( a , b , c , d ) { s ( t ) } ( τ ) = { 1 j b e j d τ 2 2 b ∫ − ∞ ∞ s ( t ) e j a t 2 2 b e − j 2 π t τ b d t b ≠ 0 d e j c d τ 2 2 s ( d τ ) b = 0 L_{(a,b,c,d)}\{s(t)\}(\tau) = \begin{cases}
\sqrt{\frac{1}{jb}}e^{j\frac{d\tau^2}{2b}}\int_{-\infty}^{\infty}s(t)e^{j\frac{at^2}{2b}}e^{-j\frac{2\pi t\tau}{b}}dt & b \neq 0 \\
\sqrt{d}e^{j\frac{cd\tau^2}{2}}s(d\tau) & b = 0
\end{cases} L ( a , b , c , d ) { s ( t ) } ( τ ) = ⎩ ⎪ ⎨ ⎪ ⎧ j b 1 e j 2 b d τ 2 ∫ − ∞ ∞ s ( t ) e j 2 b a t 2 e − j b 2 π t τ d t d e j 2 c d τ 2 s ( d τ ) b = 0 b = 0
其中参数矩阵满足[ a b c d ] \begin{bmatrix} a & b \\ c & d \end{bmatrix} [ a c b d ] a d − b c = 1 ad - bc = 1 a d − b c = 1
菲涅尔变换对应于参数:a = d = 1 a = d = 1 a = d = 1 b = λ z b = \lambda z b = λ z c = 0 c = 0 c = 0
F λ z { s ( t ) } ( τ ) = 1 j λ z e j τ 2 2 λ z ∫ − ∞ ∞ s ( t ) e j t 2 2 λ z e − j 2 π t τ λ z d t \mathcal{F}_{\lambda z}\{s(t)\}(\tau) = \sqrt{\frac{1}{j\lambda z}}e^{j\frac{\tau^2}{2\lambda z}}\int_{-\infty}^{\infty}s(t)e^{j\frac{t^2}{2\lambda z}}e^{-j\frac{2\pi t\tau}{\lambda z}}dt
F λ z { s ( t ) } ( τ ) = j λ z 1 e j 2 λ z τ 2 ∫ − ∞ ∞ s ( t ) e j 2 λ z t 2 e − j λ z 2 π t τ d t
令a = λ z a = \lambda z a = λ z 1 / j = e − j π / 4 / 1 = e − j π / 4 \sqrt{1/j} = e^{-j\pi/4}/\sqrt{1} = e^{-j\pi/4} 1 / j = e − j π / 4 / 1 = e − j π / 4
F a { s ( t ) } ( τ ) = e − j π 4 a e j π τ 2 a ∫ − ∞ ∞ s ( t ) e j π t 2 a e − j 2 π t τ a d t \mathcal{F}_a\{s(t)\}(\tau) = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}}e^{j\frac{\pi\tau^2}{a}}\int_{-\infty}^{\infty}s(t)e^{j\frac{\pi t^2}{a}}e^{-j\frac{2\pi t\tau}{a}}dt
F a { s ( t ) } ( τ ) = a e − j 4 π e j a π τ 2 ∫ − ∞ ∞ s ( t ) e j a π t 2 e − j a 2 π t τ d t
A.2 菲涅尔变换的卷积定理证明
设r ( t ) = h ( t ) ∗ s ( t ) = ∫ h ( ξ ) s ( t − ξ ) d ξ r(t) = h(t) * s(t) = \int h(\xi)s(t-\xi)d\xi r ( t ) = h ( t ) ∗ s ( t ) = ∫ h ( ξ ) s ( t − ξ ) d ξ
r ^ ( τ ) = e − j π 4 a ∫ r ( t ) e j π ( τ − t ) 2 a d t \hat{r}(\tau) = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}}\int r(t)e^{j\frac{\pi(\tau-t)^2}{a}}dt
r ^ ( τ ) = a e − j 4 π ∫ r ( t ) e j a π ( τ − t ) 2 d t
= e − j π 4 a ∫ ∫ h ( ξ ) s ( t − ξ ) e j π ( τ − t ) 2 a d ξ d t = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}}\int\int h(\xi)s(t-\xi)e^{j\frac{\pi(\tau-t)^2}{a}}d\xi dt
= a e − j 4 π ∫ ∫ h ( ξ ) s ( t − ξ ) e j a π ( τ − t ) 2 d ξ d t
令u = t − ξ u = t - \xi u = t − ξ t = u + ξ t = u + \xi t = u + ξ d t = d u dt = du d t = d u
r ^ ( τ ) = e − j π 4 a ∫ h ( ξ ) ∫ s ( u ) e j π ( τ − u − ξ ) 2 a d u d ξ \hat{r}(\tau) = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}}\int h(\xi)\int s(u)e^{j\frac{\pi(\tau-u-\xi)^2}{a}}du d\xi
r ^ ( τ ) = a e − j 4 π ∫ h ( ξ ) ∫ s ( u ) e j a π ( τ − u − ξ ) 2 d u d ξ
= e − j π 4 a ∫ h ( ξ ) e j π ( τ − ξ ) 2 a [ e j π 4 a ∫ s ( u ) e j π ( ( τ − ξ ) − u ) 2 a d u ] d ξ = \frac{e^{-j\frac{\pi}{4}}}{\sqrt{a}}\int h(\xi)e^{j\frac{\pi(\tau-\xi)^2}{a}}\left[\frac{e^{j\frac{\pi}{4}}}{\sqrt{a}}\int s(u)e^{j\frac{\pi((\tau-\xi)-u)^2}{a}}du\right]d\xi
= a e − j 4 π ∫ h ( ξ ) e j a π ( τ − ξ ) 2 [ a e j 4 π ∫ s ( u ) e j a π ( ( τ − ξ ) − u ) 2 d u ] d ξ
内层积分正是s ( t ) s(t) s ( t ) τ − ξ \tau-\xi τ − ξ s ^ ( τ − ξ ) \hat{s}(\tau-\xi) s ^ ( τ − ξ )
r ^ ( τ ) = ∫ h ( ξ ) s ^ ( τ − ξ ) d ξ = h ( τ ) ∗ s ^ ( τ ) \hat{r}(\tau) = \int h(\xi)\hat{s}(\tau-\xi)d\xi = h(\tau) * \hat{s}(\tau)
r ^ ( τ ) = ∫ h ( ξ ) s ^ ( τ − ξ ) d ξ = h ( τ ) ∗ s ^ ( τ )
类似地可证:r ^ ( τ ) = h ^ ( τ ) ∗ s ( τ ) \hat{r}(\tau) = \hat{h}(\tau) * s(\tau) r ^ ( τ ) = h ^ ( τ ) ∗ s ( τ )
A.3 离散菲涅尔变换的循环卷积性质
对于长度为N N N
r ( n ) = ∑ k = 0 N − 1 h ( k ) s ( ( n − k ) m o d N ) r(n) = \sum_{k=0}^{N-1}h(k)s((n-k)\bmod N)
r ( n ) = k = 0 ∑ N − 1 h ( k ) s ( ( n − k ) m o d N )
矩阵形式:r = H s \mathbf{r} = \mathbf{Hs} r = H s H \mathbf{H} H
DFnT的循环卷积性质证明:
r ^ = Φ r = Φ H s \hat{\mathbf{r}} = \Phi\mathbf{r} = \Phi\mathbf{Hs}
r ^ = Φ r = Φ H s
由于H \mathbf{H} H
H = ∑ k = 0 N − 1 h ( k ) P k \mathbf{H} = \sum_{k=0}^{N-1}h(k)\mathbf{P}^k
H = k = 0 ∑ N − 1 h ( k ) P k
其中P \mathbf{P} P
r ^ = Φ ( ∑ k = 0 N − 1 h ( k ) P k ) s = ∑ k = 0 N − 1 h ( k ) Φ P k s \hat{\mathbf{r}} = \Phi\left(\sum_{k=0}^{N-1}h(k)\mathbf{P}^k\right)\mathbf{s} = \sum_{k=0}^{N-1}h(k)\Phi\mathbf{P}^k\mathbf{s}
r ^ = Φ ( k = 0 ∑ N − 1 h ( k ) P k ) s = k = 0 ∑ N − 1 h ( k ) Φ P k s
根据DFnT的移位性质:Φ P k = D k Φ \Phi\mathbf{P}^k = \mathbf{D}_k\Phi Φ P k = D k Φ D k \mathbf{D}_k D k
r ^ = ∑ k = 0 N − 1 h ( k ) D k Φ s = ∑ k = 0 N − 1 h ( k ) D k s ^ \hat{\mathbf{r}} = \sum_{k=0}^{N-1}h(k)\mathbf{D}_k\Phi\mathbf{s} = \sum_{k=0}^{N-1}h(k)\mathbf{D}_k\hat{\mathbf{s}}
r ^ = k = 0 ∑ N − 1 h ( k ) D k Φ s = k = 0 ∑ N − 1 h ( k ) D k s ^
这可以重新排列为:
r ^ = H s ^ \hat{\mathbf{r}} = \mathbf{H}\hat{\mathbf{s}}
r ^ = H s ^
其中H \mathbf{H} H
附录B:正交啁啾波形的构造细节
B.1 时间塔尔博特距离的推导
从光学塔尔博特距离Z T = d 2 / λ Z_T = d^2/\lambda Z T = d 2 / λ d d d λ \lambda λ
空间周期d d d T T T
空间坐标x x x t t t
波长λ \lambda λ
因此时间塔尔博特距离:
Z T = T 2 λ Z_T = \frac{T^2}{\lambda}
Z T = λ T 2
B.2 啁啾波形正交性的完整证明
考虑两个啁啾波形ψ m ( t ) \psi_m(t) ψ m ( t ) ψ n ( t ) \psi_n(t) ψ n ( t )
⟨ ψ m , ψ n ⟩ = ∫ 0 T ψ m ∗ ( t ) ψ n ( t ) d t \langle\psi_m, \psi_n\rangle = \int_0^T \psi_m^*(t)\psi_n(t)dt
⟨ ψ m , ψ n ⟩ = ∫ 0 T ψ m ∗ ( t ) ψ n ( t ) d t
= ∫ 0 T e j π N T 2 [ ( t − m T N ) 2 − ( t − n T N ) 2 ] d t = \int_0^T e^{j\frac{\pi N}{T^2}\left[\left(t-m\frac{T}{N}\right)^2 - \left(t-n\frac{T}{N}\right)^2\right]}dt
= ∫ 0 T e j T 2 π N [ ( t − m N T ) 2 − ( t − n N T ) 2 ] d t
展开平方项:
( t − m T N ) 2 − ( t − n T N ) 2 = 2 t T ( m − n ) N − T 2 ( m 2 − n 2 ) N 2 \left(t-m\frac{T}{N}\right)^2 - \left(t-n\frac{T}{N}\right)^2 = 2t\frac{T(m-n)}{N} - \frac{T^2(m^2-n^2)}{N^2}
( t − m N T ) 2 − ( t − n N T ) 2 = 2 t N T ( m − n ) − N 2 T 2 ( m 2 − n 2 )
代入积分:
⟨ ψ m , ψ n ⟩ = e j π ( n 2 − m 2 ) N ∫ 0 T e j 2 π ( m − n ) t T d t \langle\psi_m, \psi_n\rangle = e^{j\frac{\pi(n^2-m^2)}{N}}\int_0^T e^{j\frac{2\pi(m-n)t}{T}}dt
⟨ ψ m , ψ n ⟩ = e j N π ( n 2 − m 2 ) ∫ 0 T e j T 2 π ( m − n ) t d t
当m ≠ n m \neq n m = n
∫ 0 T e j 2 π ( m − n ) t T d t = T j 2 π ( m − n ) [ e j 2 π ( m − n ) − 1 ] = 0 \int_0^T e^{j\frac{2\pi(m-n)t}{T}}dt = \frac{T}{j2\pi(m-n)}\left[e^{j2\pi(m-n)} - 1\right] = 0
∫ 0 T e j T 2 π ( m − n ) t d t = j 2 π ( m − n ) T [ e j 2 π ( m − n ) − 1 ] = 0
当m = n m = n m = n T T T
⟨ ψ m , ψ n ⟩ = T δ m n \langle\psi_m, \psi_n\rangle = T\delta_{mn}
⟨ ψ m , ψ n ⟩ = T δ m n
B.3 DFnT矩阵的特征值
DFnT矩阵Φ \Phi Φ
λ k = { e − j π k 2 2 N N ≡ 0 ( m o d 4 ) e − j π k 2 2 N N ≡ 2 ( m o d 4 ) e − j π ( 2 k + 1 ) 2 8 N N ≡ 1 ( m o d 4 ) e j π ( 2 k + 1 ) 2 8 N N ≡ 3 ( m o d 4 ) \lambda_k = \begin{cases}
e^{-j\frac{\pi k^2}{2N}} & N \equiv 0\pmod{4} \\
e^{-j\frac{\pi k^2}{2N}} & N \equiv 2\pmod{4} \\
e^{-j\frac{\pi(2k+1)^2}{8N}} & N \equiv 1\pmod{4} \\
e^{j\frac{\pi(2k+1)^2}{8N}} & N \equiv 3\pmod{4}
\end{cases} λ k = ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎧ e − j 2 N π k 2 e − j 2 N π k 2 e − j 8 N π ( 2 k + 1 ) 2 e j 8 N π ( 2 k + 1 ) 2 N ≡ 0 ( m o d 4 ) N ≡ 2 ( m o d 4 ) N ≡ 1 ( m o d 4 ) N ≡ 3 ( m o d 4 )
这些特征值在提出的高效均衡算法中起关键作用,因为它们决定了相位补偿矩阵Γ \Gamma Γ


评论(0)