ROS核心概念解析:从Node到Master,再到roslaunch的全面指南

Node
在ROS中,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点。 从程序角度来说,node就是一个可执行文件(通常为C++编译生成的可执行文件、Python脚本)被执行,加载到了内存之中;从功能角度来说,通常一个node负责者机器人的某一个单独的功能。由于机器人的功能模块非常复杂,我们往往不会把所有功能都集中到一个node上,而会采用分布式的方式,把鸡蛋放到不同的篮子里。
Master
由于机器人的元器件很多,功能庞大,因此实际运行时往往会运行众多的node,负责感知世界、控制运动、决策和计算等功能。那么如何合理的进行调配、管理这些node?这就要利用ROS提供给我们的节点管理器master, master在整个网络通信架构里相当于管理中心,管理着各个node。node首先在master处进行注册,之后master会将该node纳入整个ROS程序中。node之间的通信也是先由master进行“牵线”,才能两两的进行点对点通信。当ROS程序启动时,第一步首先启动master,由节点管理器处理依次启动node。
启动master和node
当我们要启动ROS时,首先输入命令:
$ roscore
此时ROS master启动,同时启动的还有rosout和parameter server,其中rosout是负责日志输出的一个节点,其作用是告知用户当前系统的状态,包括输出系统的error、warning等等,并且将log记录于日志文件中,parameter server即是参数服务器,它并不是一个node,而是存储参数配置的一个服务器。每一次我们运行ROS的节点前,都需要把master启动起来,这样才能够让节点启动和注册。
master之后,节点管理器就开始按照系统的安排协调进行启动具体的节点。节点就是一个进程,只不过在ROS中它被赋予了专用的名字—node。我们知道一个package中存放着可执行文件,可执行文件是静态的,当系统执行这些可执行文件,将这些文件加载到内存中,它就成为了动态的node。
具体启动node的语句是:
$ rosrun pkg_name node_name
通常我们运行ROS,就是按照这样的顺序启动,有时候节点太多,我们会选择用launch文件来启动。 Master、Node之间以及Node之间的关系如下图所示:

rosrun和rosnode命令
rosrun命令的详细用法如下:
$ rosrun [--prefix cmd] [--debug] pkg_name node_name [ARGS]
rosrun将会寻找PACKAGE下的名为EXECUTABLE的可执行程序,将可选参数ARGS传入。
例如在GDB下运行ros程序:
$ rosrun --prefix 'gdb -ex run --args' pkg_name node_name
rosnode命令的详细作用列表如下:
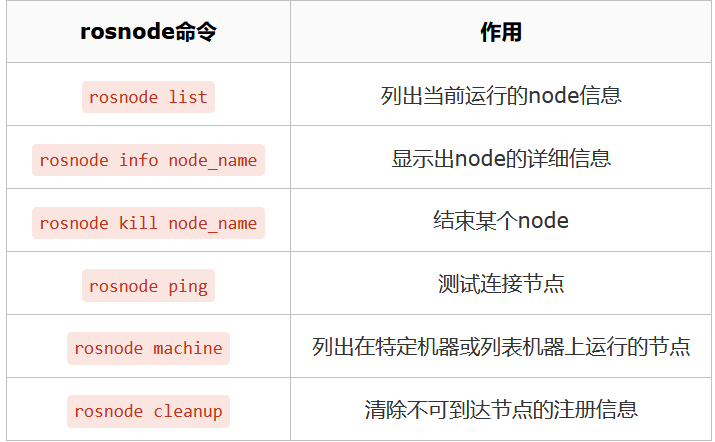
以上命令中常用的为前三个,在开发调试时经常会需要查看当前node以及node信息,所以请记住这些常用命令。如果想不起来,也可以通过rosnode help来查看rosnode命令的用法。
机器人是一个系统工程,通常一个机器人运行操作时要开启多个node,对于一个复杂的机器人的启动操作应该怎么做呢?当然,我们并不需要每个节点依次进行rosrun,ROS为我们提供了一个命令能一次性启动master和多个node。该命令是:
$ roslaunch pkg_name file_name.launch
roslaunch命令首先会自动进行检测系统的roscore有没有运行,也即是确认节点管理器是否在运行状态中,如果master没有启动,那么roslaunch就会首先启动master,然后再按照launch的规则执行。launch文件里已经配置好了启动的规则。 所以roslaunch就像是一个启动工具,能够一次性把多个节点按照我们预先的配置启动起来,减少我们在终端中一条条输入指令的麻烦。
launch文件同样也遵循着xml格式规范,是一种标签文本,它的格式包括以下标签:
<launch> <!--根标签-->
<node> <!--需要启动的node及其参数-->
<include> <!--包含其他launch-->
<machine> <!--指定运行的机器-->
<env-loader> <!--设置环境变量-->
<param> <!--定义参数到参数服务器-->
<rosparam> <!--启动yaml文件参数到参数服务器-->
<arg> <!--定义变量-->
<remap> <!--设定参数映射-->
<group> <!--设定命名空间-->
</launch> <!--根标签-->
launch文件的写法和格式看起来内容比较复杂,我们先来介绍一个最简单的例子如下:
<launch>
<node name="talker" pkg="rospy_tutorials" type="talker" />
</launch>
文本中的信息是,它启动了一个单独的节点talker,该节点是包rospy_tutorials软件包中的节点。
然而实际中的launch文件要复杂很多,我们以Ros-Academy-for-Beginners中的robot_sim_demo为例:
<launch>
<!--arg是launch标签中的变量声明,arg的name为变量名,default或者value为值-->
<arg name="robot" default="xbot2"/>
<arg name="debug" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<!-- Start Gazebo with a blank world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch"> <!--include用来嵌套仿真场景的launch文件-->
<arg name="world_name" value="$(find robot_sim_demo)/worlds/ROS-Academy.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Oh, you wanted a robot? --> <!--嵌套了机器人的launch文件-->
<include file="$(find robot_sim_demo)/launch/include/$(arg robot).launch.xml" />
<!--如果你想连同RViz一起启动,可以按照以下方式加入RViz这个node-->
<!--node name="rviz" pkg="rviz" type="rviz" args="-d $(find robot_sim_demo)/urdf_gazebo.rviz" /-->
</launch>
这个launch文件相比上一个简单的例子来说,内容稍微有些复杂,它的作用是:启动gazebo模拟器,导入参数内容,加入机器人模型。
对于初学者,我们不要求掌握每一个标签是什么作用,但至少应该有一个印象。如果我们要进行自己写launch文件,可以先从改launch文件的模板入手,基本可以满足普通项目的要求。

- 点赞
- 收藏
- 关注作者
评论(0)