STM32 Cubemx配置SPI编程(使用Flash模块)

@TOC
前言
本篇文章来为大家讲解一下Flash模块的使用方法,Flash模块这里选择W25Q64模块。
一、W25Q64模块介绍
W25Q64 是一款由 Winbond 公司生产的串行闪存存储器,属于其 W25Q 系列产品。以下是关于 W25Q64 模块的一些基本信息:
存储容量:W25Q64 模块通常具有 64 Megabit(Mb)的存储容量,相当于 8 Megabyte(MB)。
接口:W25Q64 采用串行外围接口(SPI)进行通信。SPI 接口是一种通用的、简单的串行通信协议,通常用于与微控制器、传感器和其他外设进行通信。
工作电压:W25Q64 通常支持 2.7V 至 3.6V 的工作电压范围。
主要特点:
高速串行接口:W25Q64 支持高达 104 MHz 的串行时钟速率,使得数据读写速度快。
大容量存储:64 Mb 的存储容量足够存储大量的数据。
低功耗:W25Q64 在读取和待机模式下具有低功耗特性,适合于要求电源效率的应用场景。
扇区擦除:支持扇区擦除,使得对存储器的擦除操作更加灵活。
写保护:W25Q64 具有写保护功能,可保护存储器中的数据不受意外写入。
应用领域:W25Q64 可广泛应用于嵌入式系统中,如智能家居设备、工业控制系统、网络设备、汽车电子等领域。它常用于存储固件、配置文件、日志数据等。
支持软件:通常,W25Q64 模块可以与多种嵌入式系统和开发平台兼容,并且厂商通常会提供相应的驱动程序和示例代码,以便开发人员轻松地集成和使用该模块。
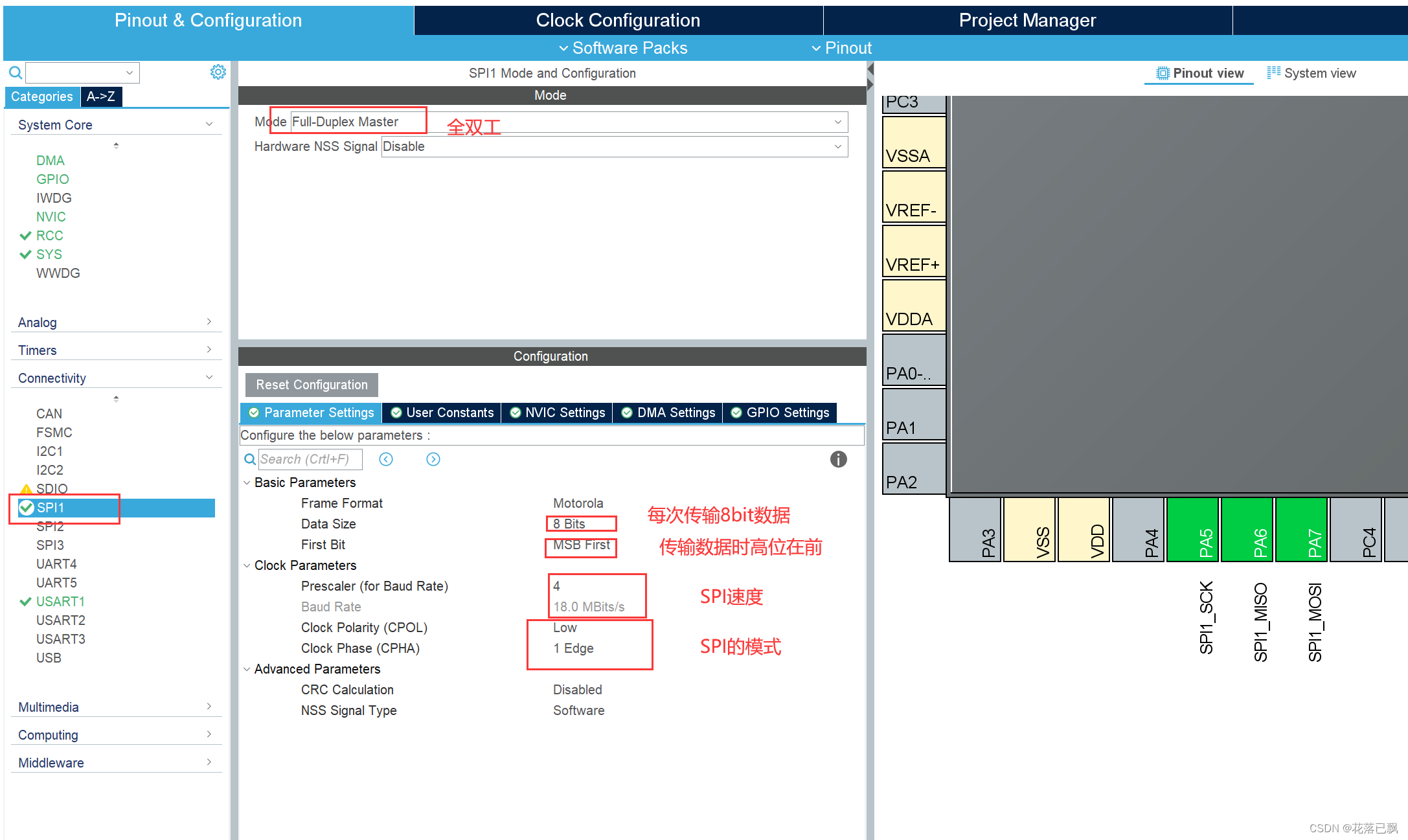
二、STM32Cubemx配置SPI
SPI Flash模块一共有6根线,接线方式如下:
| VCC | 3.3V |
|---|---|
| GND | GND |
| SCK | SPI_SCK |
| DO | SPI_MISO |
| DI | SPI_MOSI |
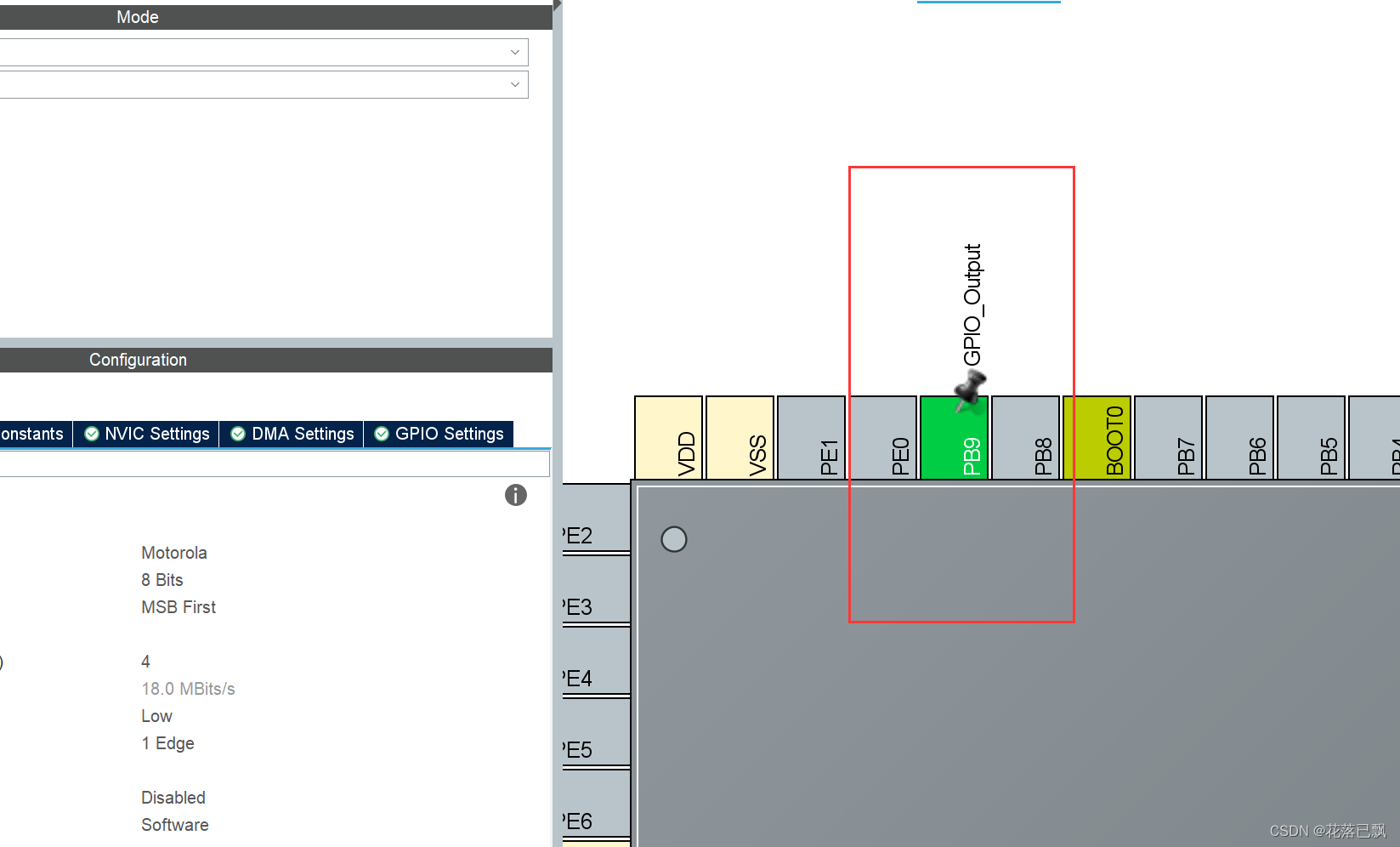
配置PB9为输出模式,作为片选引脚。
三、SPI HAL库操作函数分析
3.1查询方式
HAL_SPI_TransmitReceive():用于同时发送和接收数据。它的原型为:
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size, uint32_t Timeout);
返回值:返回一个HAL_StatusTypeDef类型的枚举值,表示函数执行的状态。通常用HAL_OK表示成功,其他值表示错误。
参数:
hspi:SPI句柄,包含了SPI的配置信息和状态信息。
pTxData:指向要发送数据的缓冲区的指针。
pRxData:指向接收数据的缓冲区的指针。
Size:要发送/接收的数据字节数。
Timeout:超时时间,以毫秒为单位。如果超过这个时间函数还没有完成,则返回超时错误。
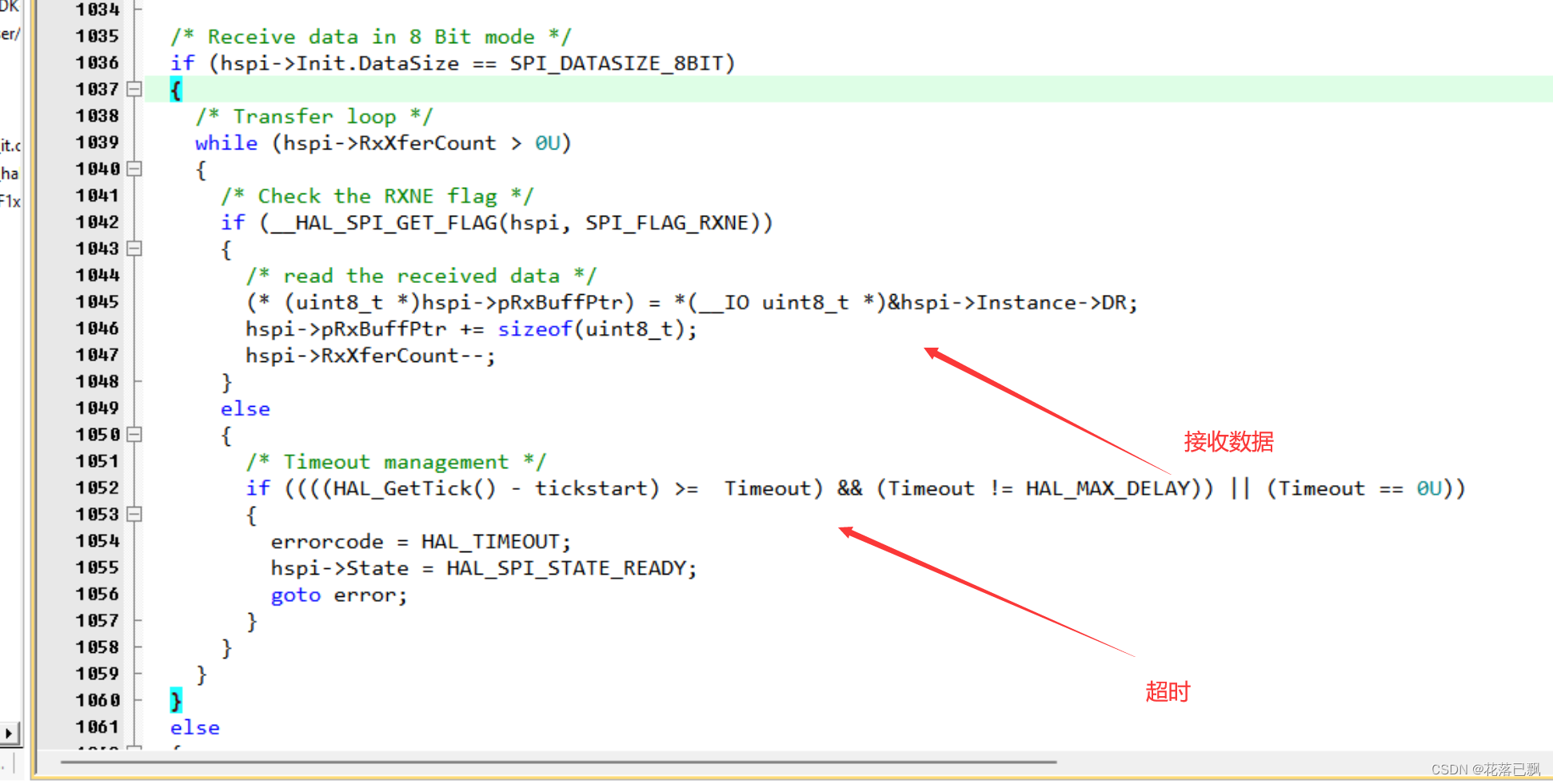
发送数据和接收数据过程:
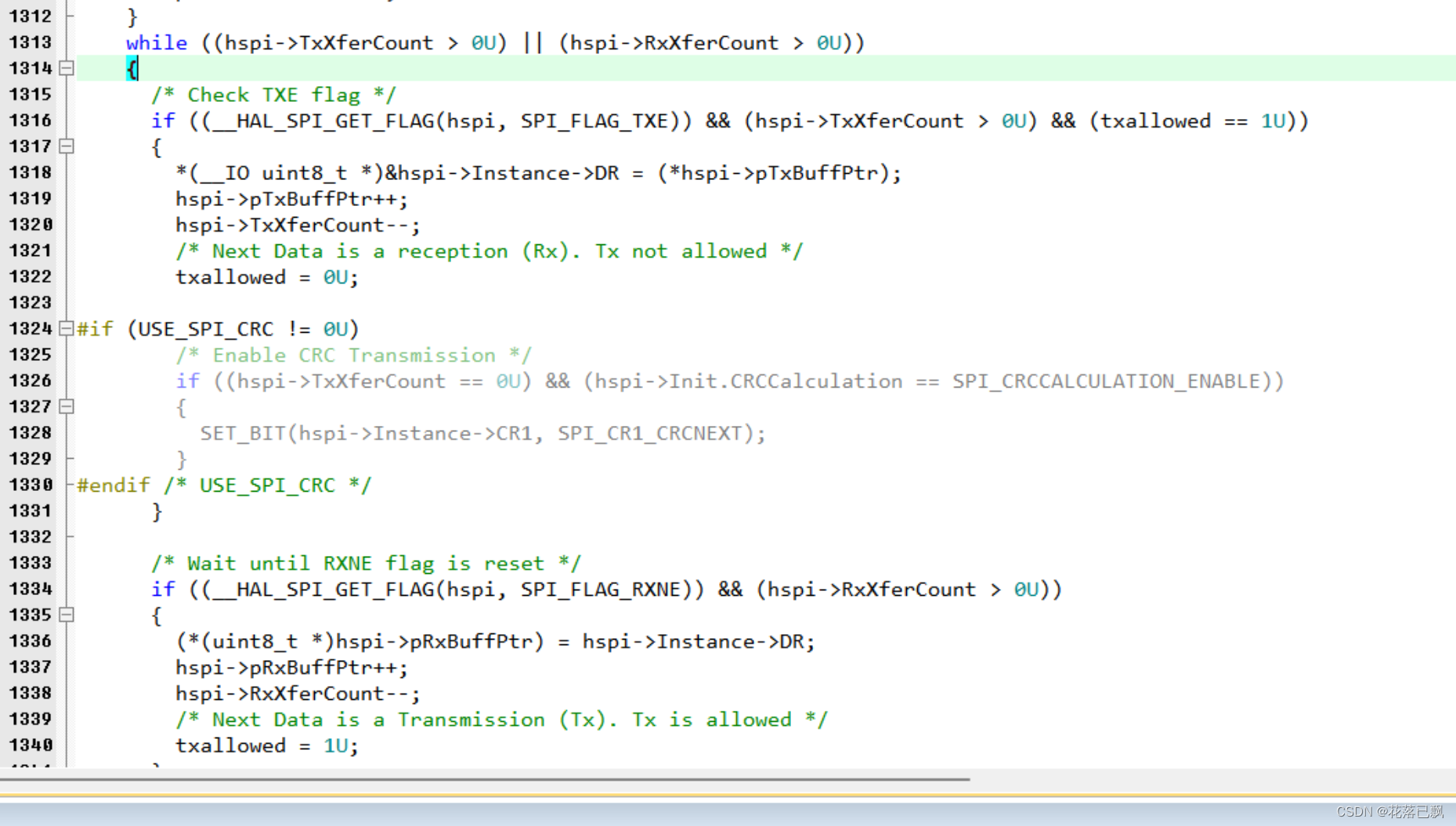
代码分析:
while ((hspi->TxXferCount > 0U) || (hspi->RxXferCount > 0U)): 这是一个 while 循环,其条件是直到所有的数据都传输完成,即直到 TxXferCount 和 RxXferCount 均为零时才退出循环。TxXferCount 表示待发送的数据数量,RxXferCount 表示待接收的数据数量。
if ((__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_TXE)) && (hspi->TxXferCount > 0U) && (txallowed == 1U)): 这是一个条件判断语句,检查是否满足以下条件:SPI 发送缓冲区为空 (SPI_FLAG_TXE)、仍有待发送的数据 (TxXferCount > 0U),并且允许发送数据 (txallowed == 1U)。如果条件成立,则将待发送数据写入到 SPI 数据寄存器 (DR) 中,并更新相关的变量,表示已发送了一个字节的数据。
txallowed = 0U;: 将 txallowed 置为 0,表示下一个操作将是接收操作,而不是发送操作。
if ((__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_RXNE)) && (hspi->RxXferCount > 0U)): 这是另一个条件判断语句,检查是否满足以下条件:SPI 接收缓冲区非空 (SPI_FLAG_RXNE),并且仍有待接收的数据 (RxXferCount > 0U)。如果条件成立,则从 SPI 数据寄存器 (DR) 中读取接收到的数据,并将其存储到接收缓冲区中。
txallowed = 1U;: 将 txallowed 置为 1,表示下一个操作将是发送操作,允许发送数据。
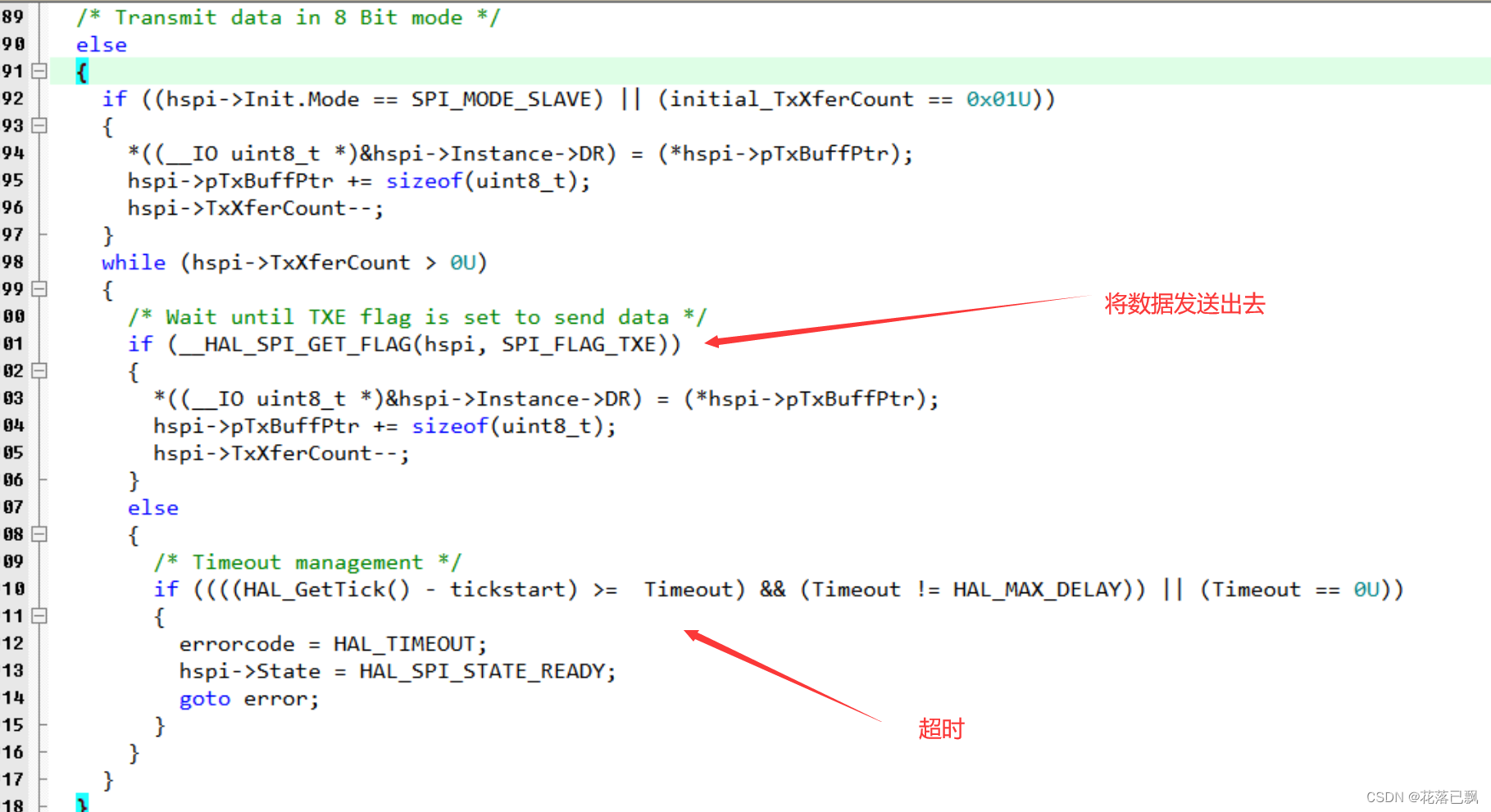
if ((((HAL_GetTick() - tickstart) >= Timeout) && ((Timeout != HAL_MAX_DELAY))) || (Timeout == 0U)): 这个条件判断语句用于检查是否超时。它检查了两个条件:一是从开始传输到当前时刻的时间是否超过了设定的超时时间 Timeout,并且 Timeout 不是设置为无限等待;二是如果 Timeout 被设置为 0,表示立即超时。如果超时条件满足,则会将错误码置为超时错误,并跳转到错误处理的标签 error。
HAL_SPI_Transmit():用于只发送数据而不接收。它的原型为:
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
返回值:同样返回HAL_StatusTypeDef类型的枚举值,表示函数执行的状态。
参数:
hspi:SPI句柄,包含了SPI的配置信息和状态信息。
pData:指向要发送数据的缓冲区的指针。
Size:要发送的数据字节数。
Timeout:超时时间,以毫秒为单位。
HAL_SPI_Receive():用于只接收数据而不发送。它的原型为:
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
返回值:同样返回HAL_StatusTypeDef类型的枚举值,表示函数执行的状态。
参数:
hspi:SPI句柄,包含了SPI的配置信息和状态信息。
pData:指向接收数据的缓冲区的指针。
Size:要接收的数据字节数。
Timeout:超时时间,以毫秒为单位。
3.2中断方式
中断方式这里就只分析下面一个函数;
HAL_StatusTypeDef HAL_SPI_TransmitReceive_IT(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size)
参数:
hspi:指向 SPI 外设句柄的指针,其中包含了 SPI 外设的配置和状态信息。
pTxData:指向要发送数据的缓冲区的指针。
pRxData:指向用于接收数据的缓冲区的指针。
Size:要发送/接收的数据的数量。
函数的返回值是一个 HAL_StatusTypeDef 类型的枚举,表示函数执行的状态,可能的返回值包括 HAL_OK(成功)和各种错误代码,如 HAL_ERROR、HAL_BUSY 等。
这个函数的作用是在 SPI 通信中以中断的方式进行数据的传输和接收。它允许将发送和接收的数据分别存储在两个不同的缓冲区中,因此可以同时进行数据的发送和接收。
这个函数主要就是将SPI中断打开并且设置中断服务程序代码。
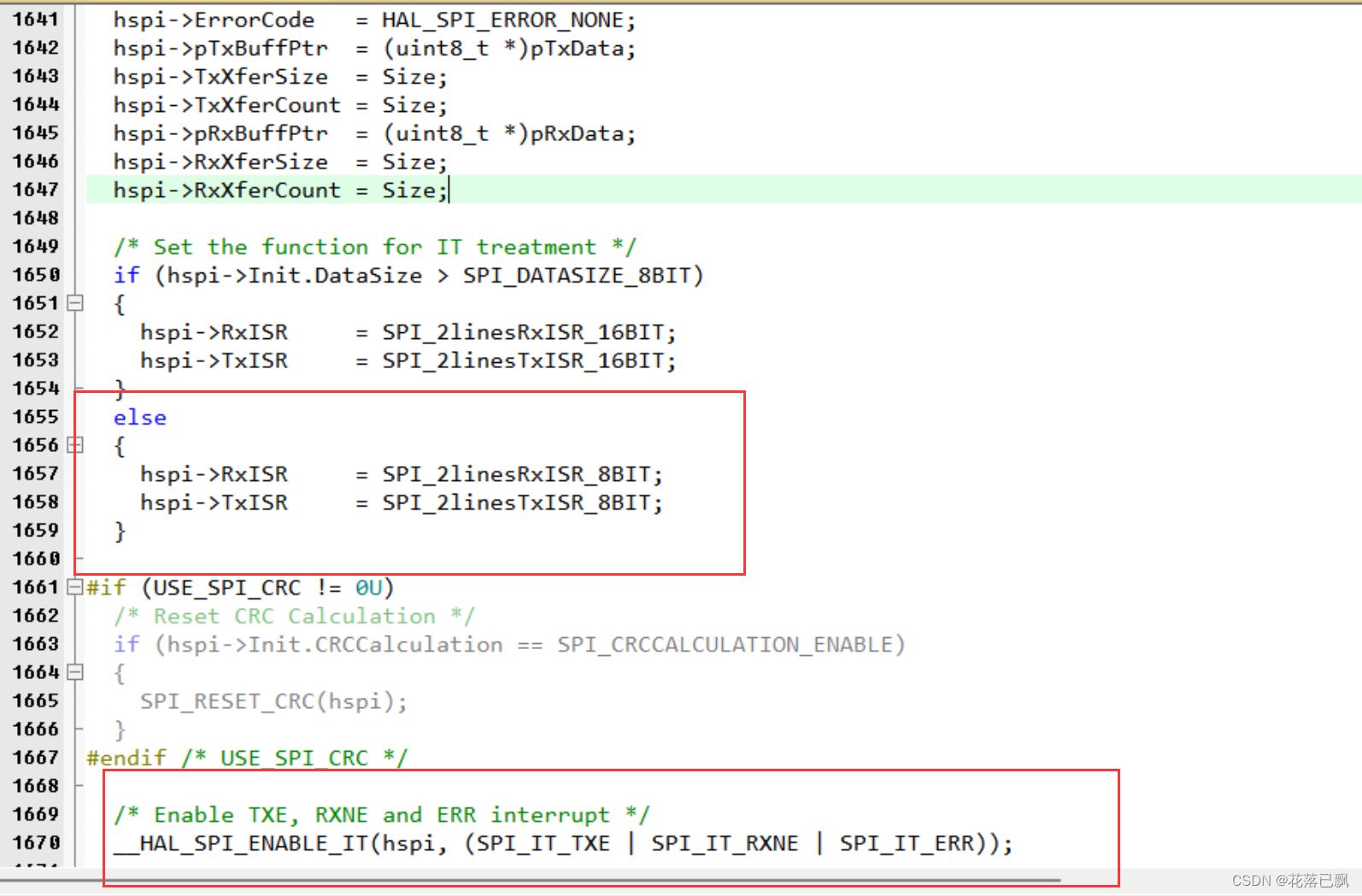
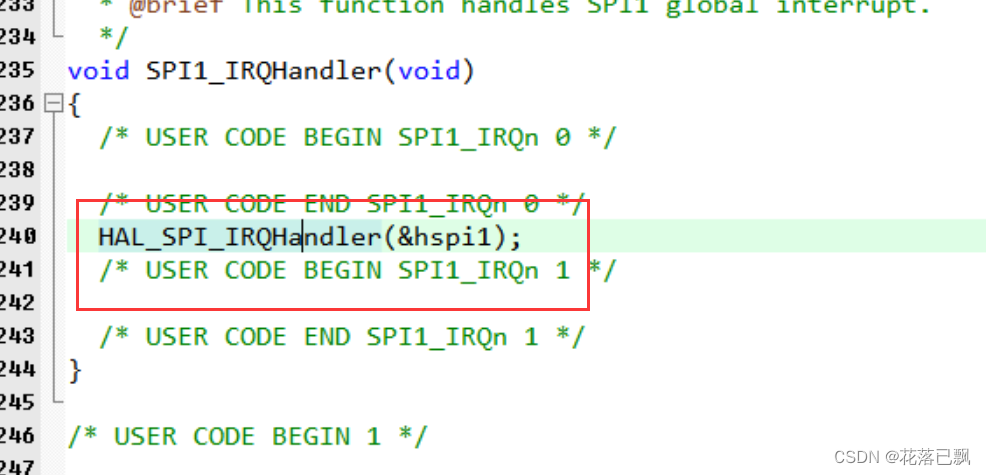
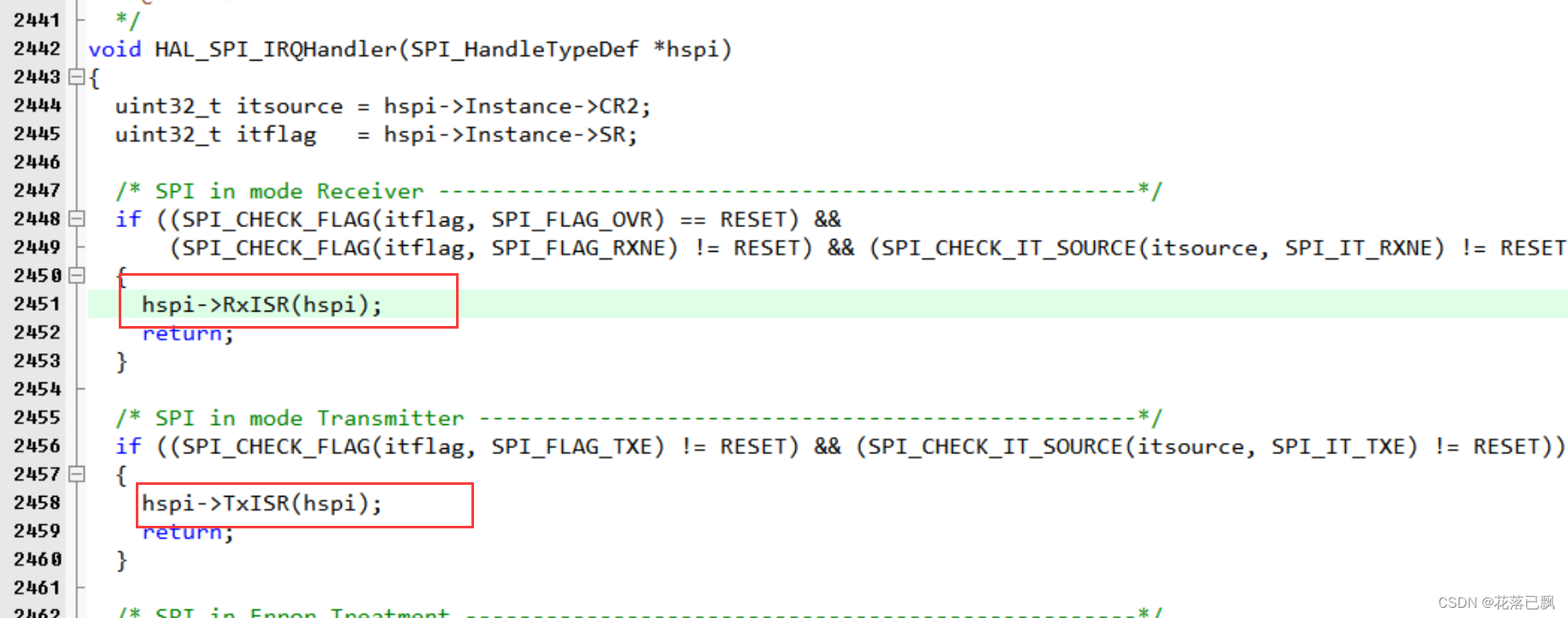
具体中断的调用流程:
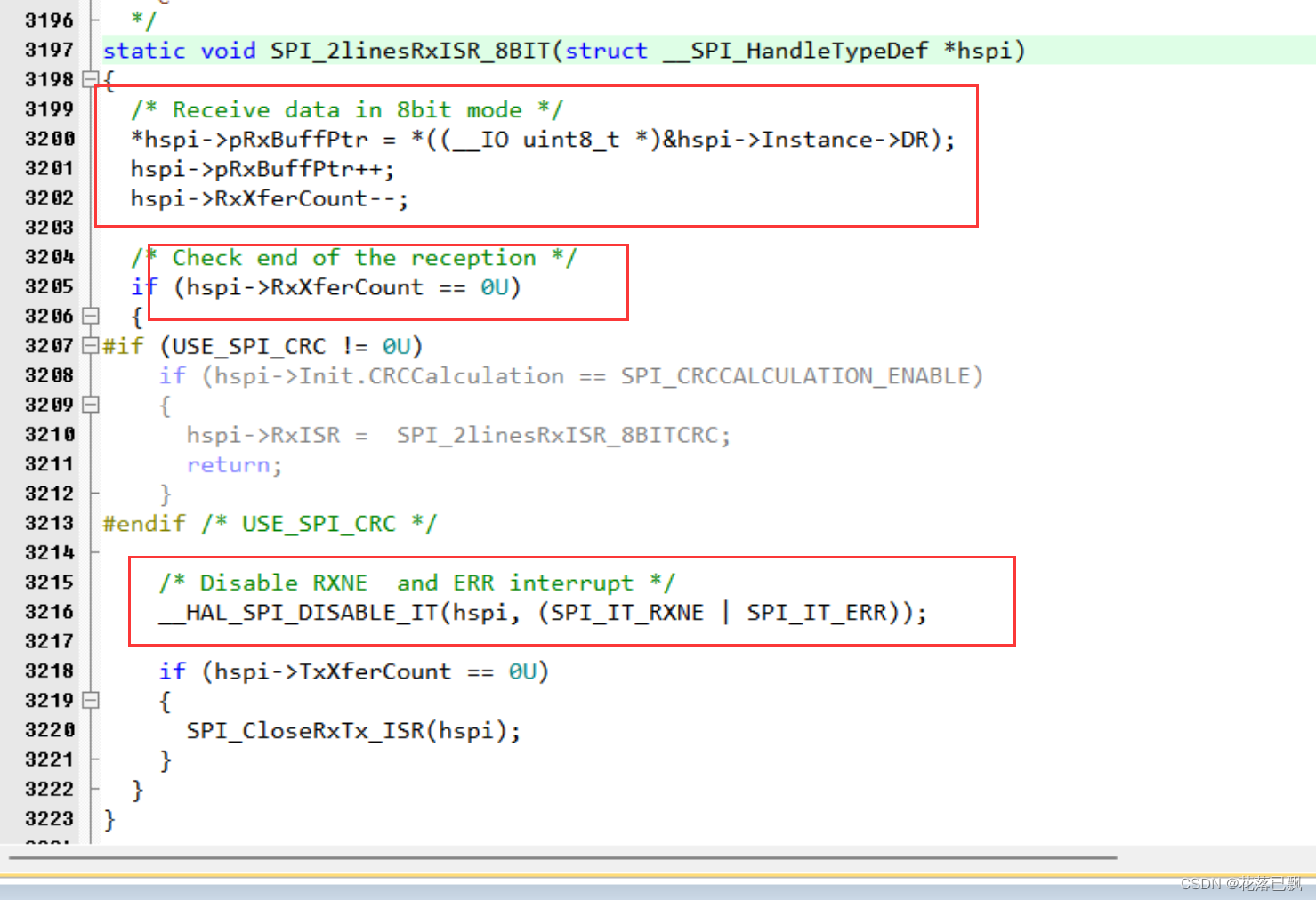
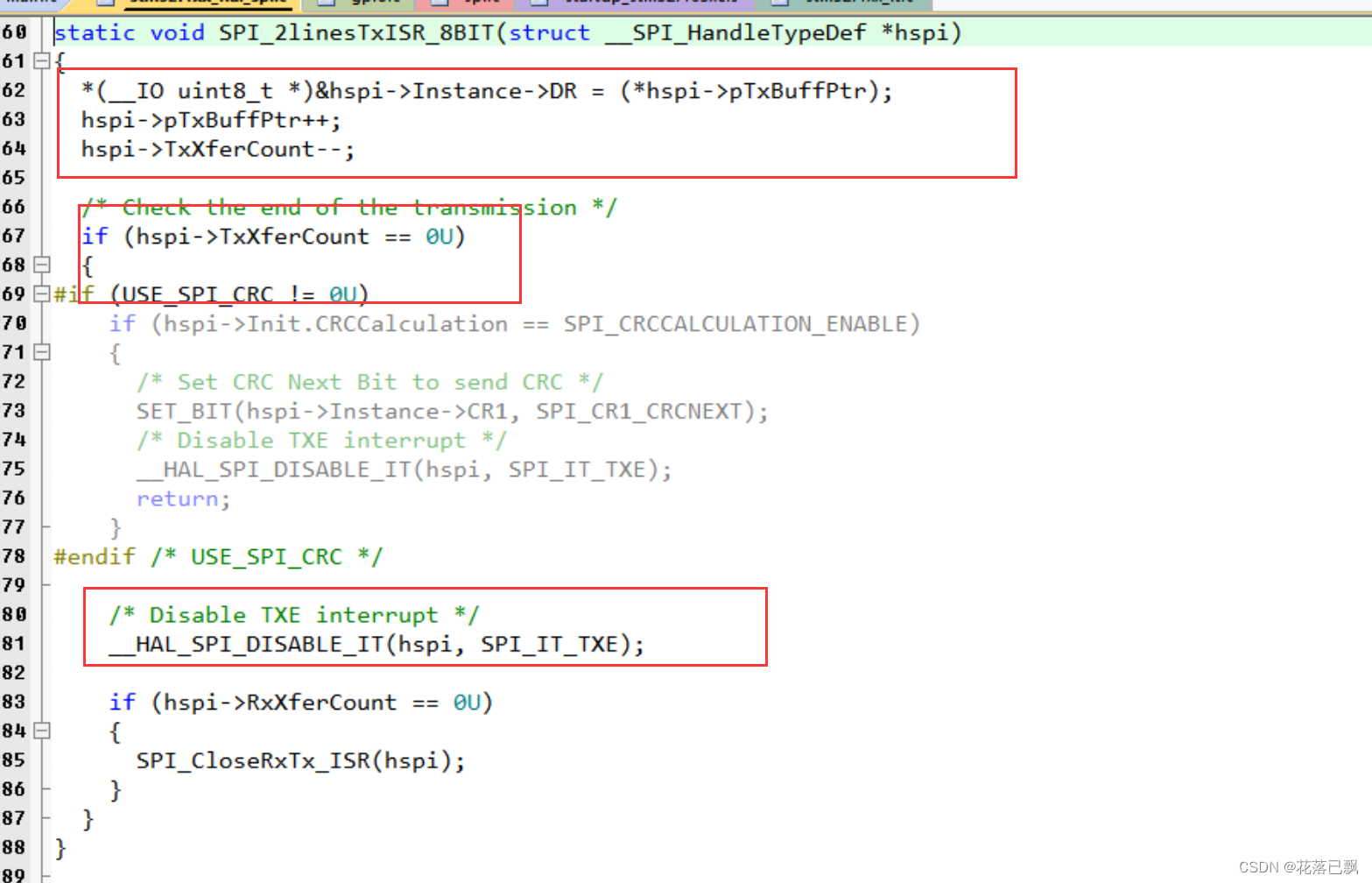
当发生中断调用设置的SPI_2linesRxISR_8BIT和SPI_2linesTxISR_8BIT两个函数。
在这两个函数的内部会判断是否有数据可以接收或者是发送,当数据接收和发送都完成后会关闭中断。
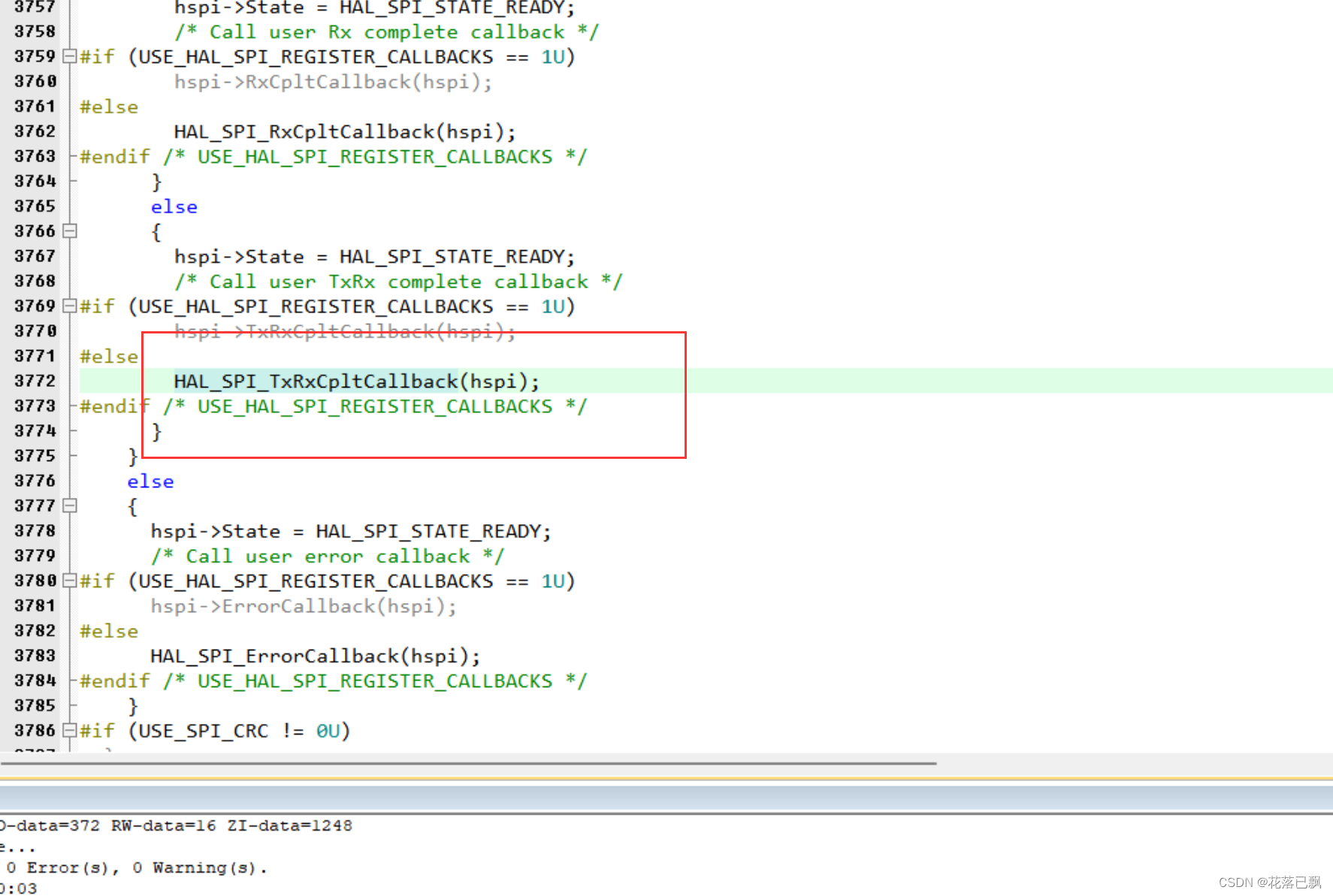
在SPI_CloseRxTx_ISR函数中会调用到HAL_SPI_TxRxCpltCallback回调函数。
四、Flash时序分析
这里我们主要会实现四个提供给外部可以使用到的函数分别是:

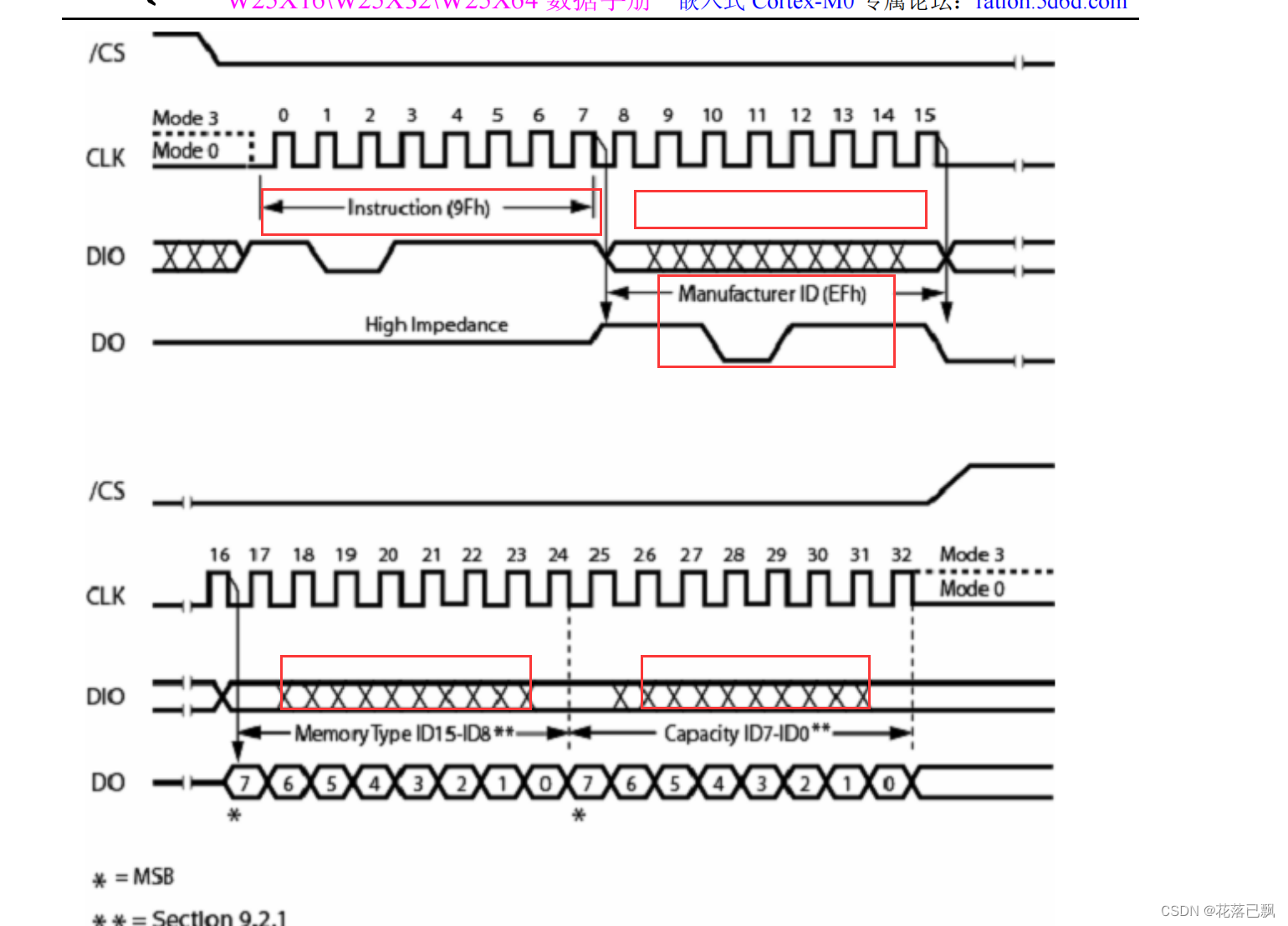
1.读器件ID指令
读器件ID的时候首先需要先将片选引脚拉低,然后再写入9Fh指令,然后就能够读取到制造ID,存储器ID,兼容性ID。
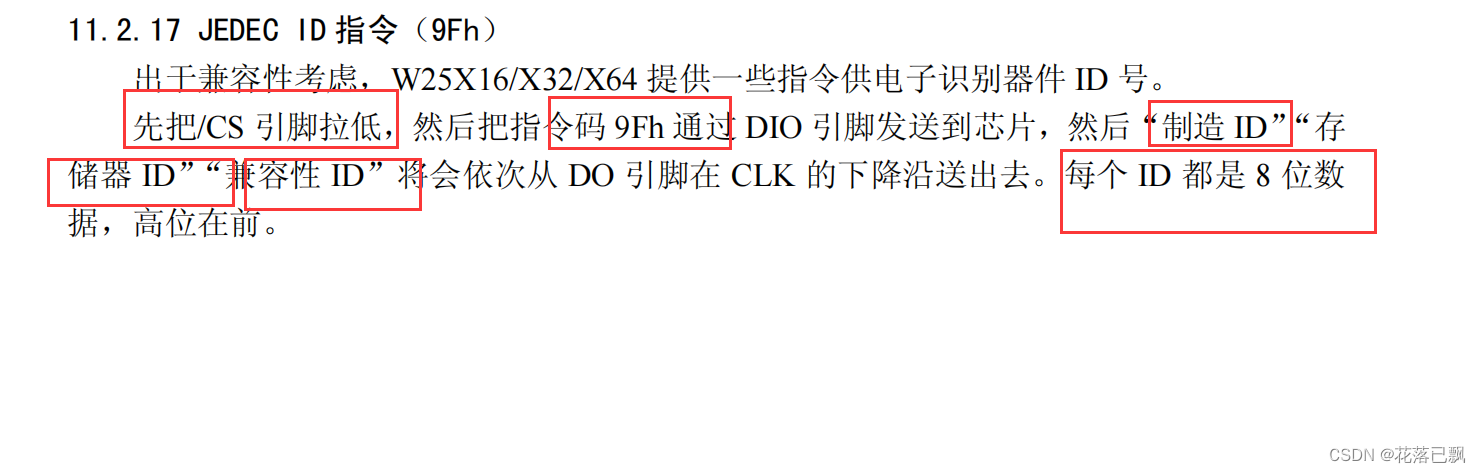
在发送完9Fh指令后还需要再发送一个指令(可以随意),因为在DO数据线上第一个数据是没有意义的数据,又因为SPI通信发送多少个数据就会接收多少个数据,所以在这里需要再次发送一个数据出去,才能读取到器件的ID。
2.写使能
在进行页编程,扇区擦除,块区擦除,芯片擦除和写状态寄存器命令之前都需要进行写使能。
写使能的操作也不是特别难,首先拉低CS引脚,然后写入06h,再拉高CS引脚。

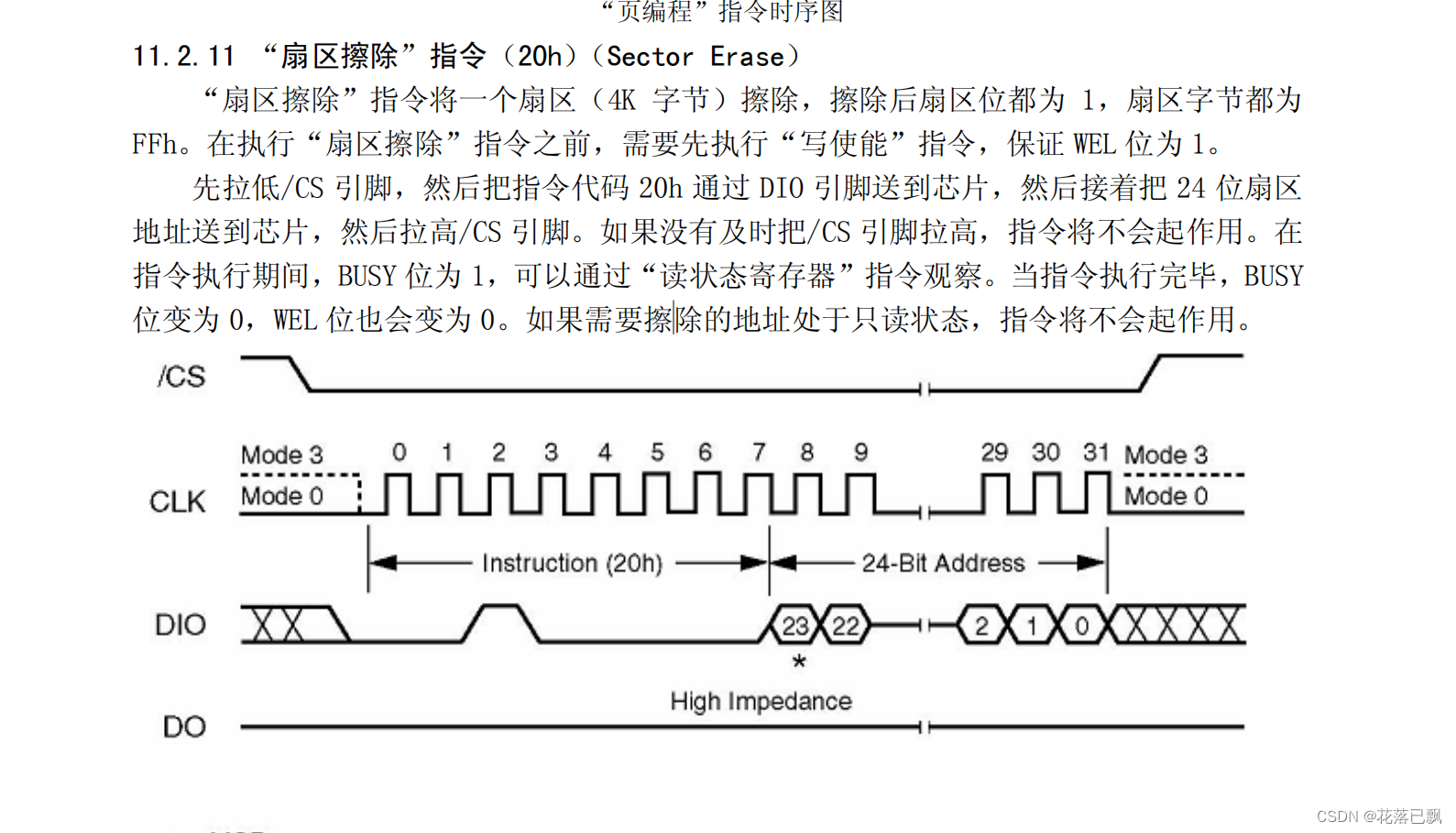
3.擦除扇区
在Flash模块中一个扇区的大小是4K字节。
在进行扇区擦除的时候需要先进行写使能,然后拉低CS引脚,再写入20h和24位的地址,擦除完成后BUSY位会变为0。
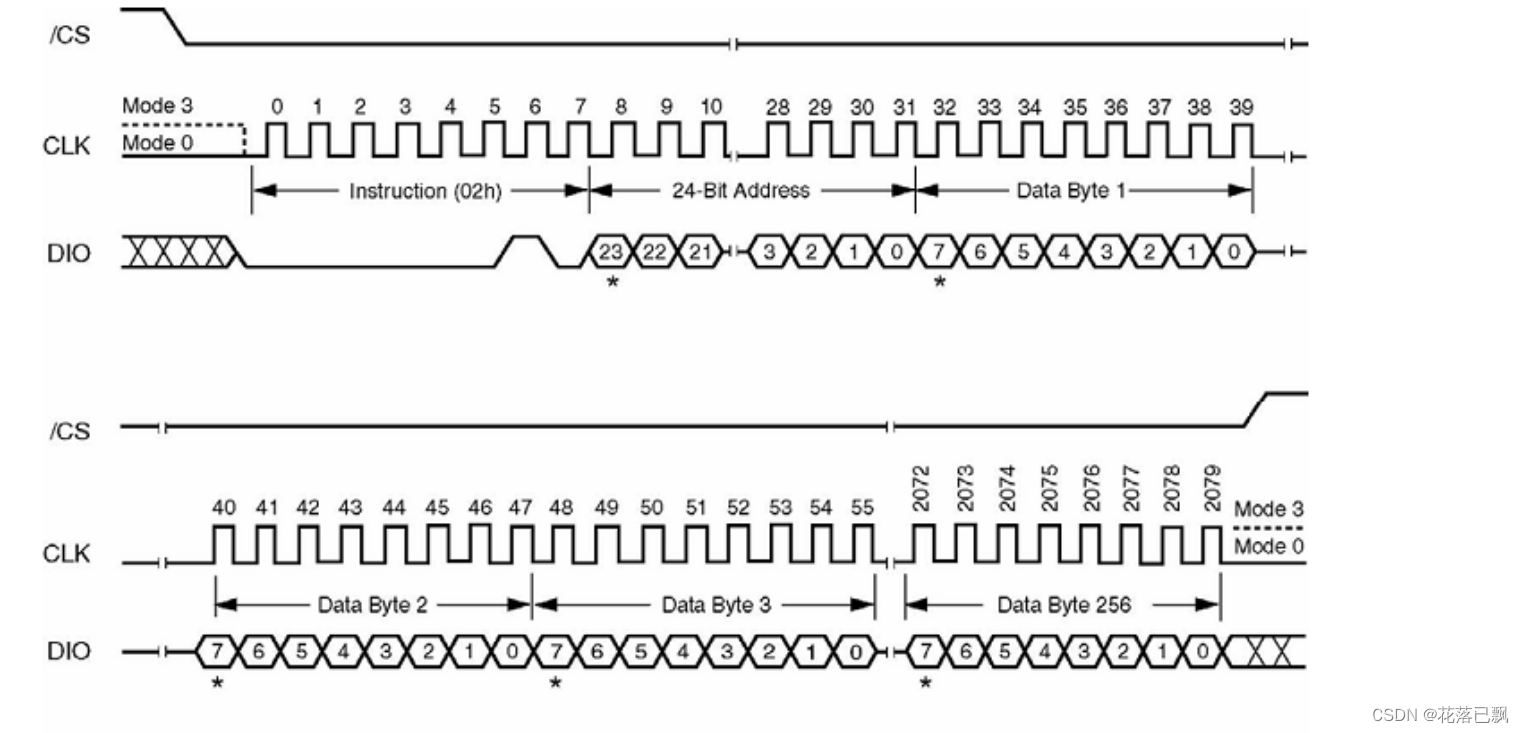
4.页编程
在进行页编程的时候,需要先进行写使能,然后把CS拉低,再写入02h指令,再把24位的地址写入,写完数据后把CS拉高,最后等待写入完成。

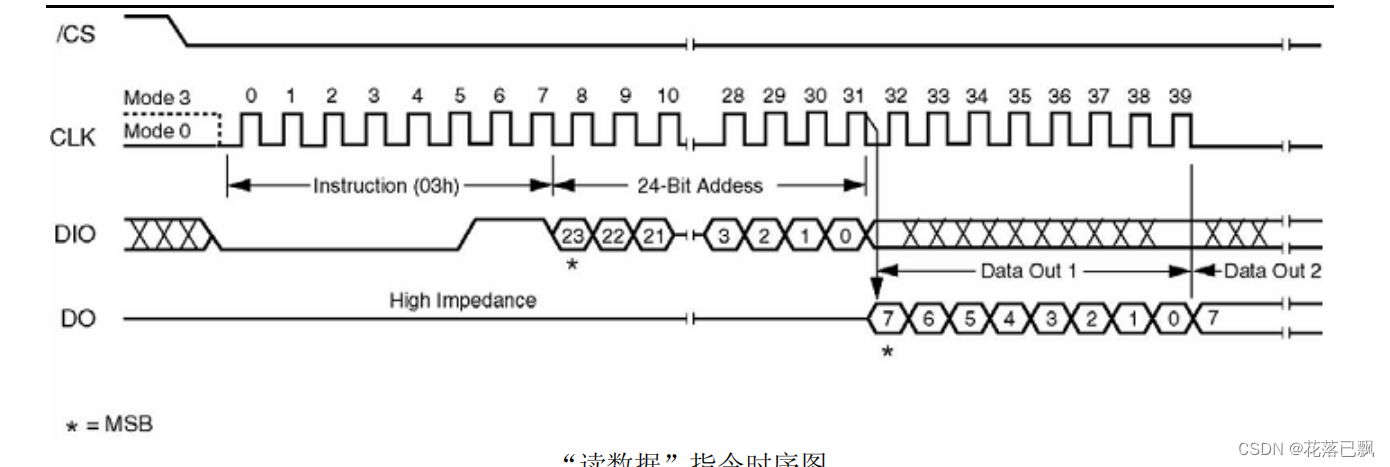
5.读数据
在读数据的时候首先把CS引脚拉低,然后写入03h指令,然后再写入要读取的24位地址,然后就可以读取到对应的数据,只要时钟线不停止就可以把整个芯片存储区的数据读取出来,最后拉低CS引脚。
6.读状态寄存器
在读状态寄存器时先将CS拉低,然后写入05h指令,当识别到是05h指令的时候芯片就会把状态寄存器的值输出,这个时候就可以读取到状态寄存器的值。
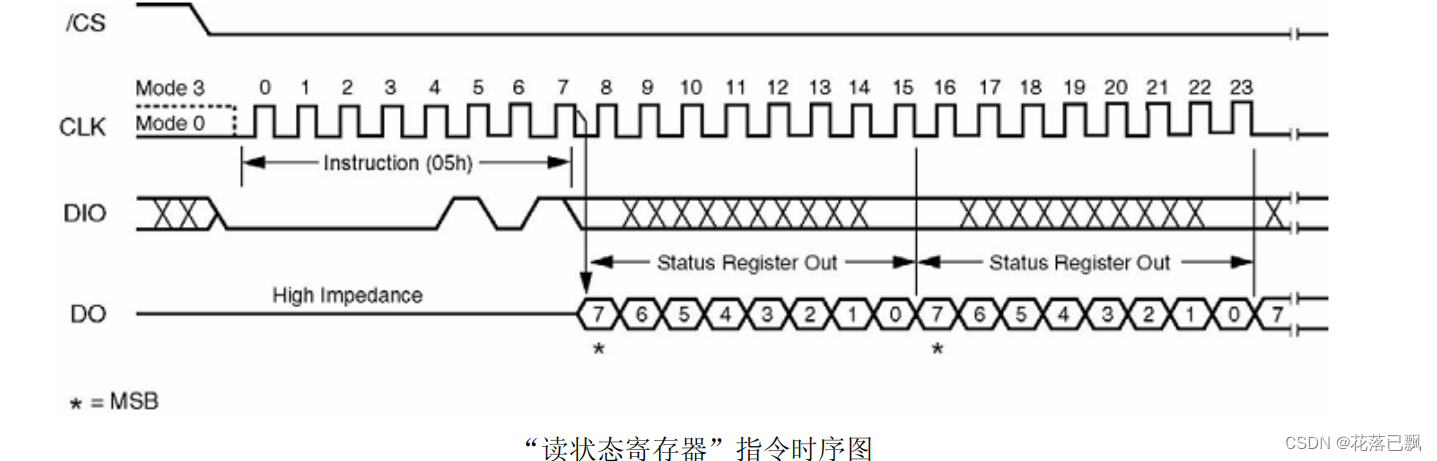
首先读取到的是BUSY位。

五、Flash驱动程序编写
1.代码编写测试
创建两个文件spiflash.c和spiflash.h用来管理SPI Flash的驱动程序:
spiflash.h
#ifndef __SPIFLASH_H__
#define __SPIFLASH_H__
#include "main.h"
int SPIFlash_ReadID(void);
int SPIFlash_EraseSector(uint32_t addr);
int SPIFlash_Write(uint16_t addr, uint8_t* datas, uint16_t len);
int SPIFlash_Read(uint16_t addr, uint8_t* datas, uint16_t len);
#endif
spiflash.c
#include "spiflash.h"
#define TIMEOUT 1000//超时时间
extern SPI_HandleTypeDef hspi1;
extern void WaitTxCplt(int timeout);
extern void WaitTxRxCplt(int timeout);
extern void WaitRxCplt(int timeout);
//选择从机拉低CS
static void CSEnable(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
}
//拉高CS结束通信过程
static void CSDisable(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
}
//写使能
static void WriteEnable(void)
{
uint8_t data = 0x06;
CSEnable();//拉低CS引脚,选中设备
HAL_SPI_Transmit_IT(&hspi1, &data, 1);
WaitTxCplt(TIMEOUT);//等待发送完成数据
CSDisable();//拉高CS引脚,失能设备
}
//读状态寄存器
static int ReadStatusReg(void)
{
uint8_t TxBuf[2] = {0x05, 0xff};//发送数据数组
uint8_t RxBuf[2] = {0, 0};//接收数据数组
CSEnable();//拉低CS引脚,选中设备
HAL_SPI_TransmitReceive_IT(&hspi1, TxBuf, RxBuf, 2);
WaitTxRxCplt(TIMEOUT);//等待发送接收完成数据
CSDisable();//拉高CS引脚,失能设备
return RxBuf[1];
}
//等待Flash模块就绪
static int SPIFlash_WaitReady(void)
{
while (ReadStatusReg() & 1 == 1);
}
//读器件ID
int SPIFlash_ReadID(void)
{
uint8_t TxBuf[2] = {0x9F, 0x00};//发送数据数组
uint8_t RxBuf[2] = {0, 0};//接收数据数组
CSEnable();//拉低CS引脚,选中设备
HAL_SPI_TransmitReceive_IT(&hspi1, TxBuf, RxBuf, 2);
WaitTxRxCplt(TIMEOUT);//等待发送接收完成数据
CSDisable();//拉高CS引脚,失能设备
return RxBuf[1];
}
//擦除扇区
int SPIFlash_EraseSector(uint32_t addr)
{
uint8_t TxBuf[4] = {0x20};
//得到24bit地址
TxBuf[1] = (addr >> 16) & 0xff;
TxBuf[2] = (addr >> 8) & 0xff;
TxBuf[3] = (addr >> 0) & 0xff;
//写使能
WriteEnable();
CSEnable();//拉低CS引脚,选中设备
HAL_SPI_Transmit_IT(&hspi1, TxBuf, 4);
WaitTxCplt(TIMEOUT);//等待发送完成数据
CSDisable();//拉高CS引脚,失能设备
//等待就绪
SPIFlash_WaitReady();
return 0;
}
//写数据
int SPIFlash_Write(uint16_t addr, uint8_t* datas, uint16_t len)
{
uint8_t TxBuf[4] = {0x02};
//得到24bit地址
TxBuf[1] = (addr >> 16) & 0xff;
TxBuf[2] = (addr >> 8) & 0xff;
TxBuf[3] = (addr >> 0) & 0xff;
//写使能
WriteEnable();
CSEnable();//拉低CS引脚,选中设备
//写命令和写地址
HAL_SPI_Transmit_IT(&hspi1, TxBuf, 4);
WaitTxCplt(TIMEOUT);//等待发送完成数据
//写数据
HAL_SPI_Transmit_IT(&hspi1, datas, len);
WaitTxCplt(TIMEOUT);//等待发送完成数据
CSDisable();//拉高CS引脚,失能设备
//等待就绪
SPIFlash_WaitReady();
return 0;
}
//读数据
int SPIFlash_Read(uint16_t addr, uint8_t* datas, uint16_t len)
{
uint8_t TxBuf[4] = {0x03};
//得到24bit地址
TxBuf[1] = (addr >> 16) & 0xff;
TxBuf[2] = (addr >> 8) & 0xff;
TxBuf[3] = (addr >> 0) & 0xff;
CSEnable();//拉低CS引脚,选中设备
//写命令和写地址
HAL_SPI_Transmit_IT(&hspi1, TxBuf, 4);
WaitTxCplt(TIMEOUT);//等待发送完成数据
//读数据
HAL_SPI_Receive_IT(&hspi1, datas, len);
WaitRxCplt(TIMEOUT);//等待读取数据完成
CSDisable();//拉高CS引脚,失能设备
return 0;
}
这里会使用到中断的方式来处理发送和接收数据完成:
//标志位用于标志是否发送和接收完成数据
static volatile int g_spi1_tx_complete = 0;
static volatile int g_spi1_rx_complete = 0;
static volatile int g_spi1_txrx_complete = 0;
//发送数据完成中断
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1)
{
g_spi1_tx_complete = 1;//接收到数据后标志位置为1
}
}
//等待发送数据完成
void WaitTxCplt(int timeout)
{
while (g_spi1_tx_complete == 0 && timeout--)
{
HAL_Delay(1);
}
g_spi1_tx_complete = 0;
}
//接收数据完成中断回调函数
void HAL_SPI_RxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1)
{
g_spi1_rx_complete = 1;//发送完成数据后标志位置为1
}
}
//等待接收数据完成
void WaitRxCplt(int timeout)
{
while (g_spi1_rx_complete == 0 && timeout--)
{
HAL_Delay(1);
}
g_spi1_rx_complete = 0;
}
//发送接收数据完成中断回调函数
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{
if (hspi == &hspi1)
{
g_spi1_txrx_complete = 1;//发送接收完成数据后标志位置为1
}
}
//等待发送接收数据完成
void WaitTxRxCplt(int timeout)
{
while (g_spi1_txrx_complete == 0 && timeout--)
{
HAL_Delay(1);
}
g_spi1_txrx_complete = 0;
}
总结
本篇文章主要讲解了STM32Cubemx配置SPI的流程以及Flash驱动程序的编写。

- 点赞
- 收藏
- 关注作者
评论(0)