【鸿蒙体验官第三期】润和软件:三周带你上手OpenHarmony设备开发(第6~8讲)下
第六讲:OpenHarmony设备网络开发
判断题
1.数据链路层就是指网络连接的物理链路通道 错误
2.只要支持socket接口就可以直接使用网络编程框架 错误
3.TCP 编程一般分为 服务端 编程 和 客服端 编程 错误
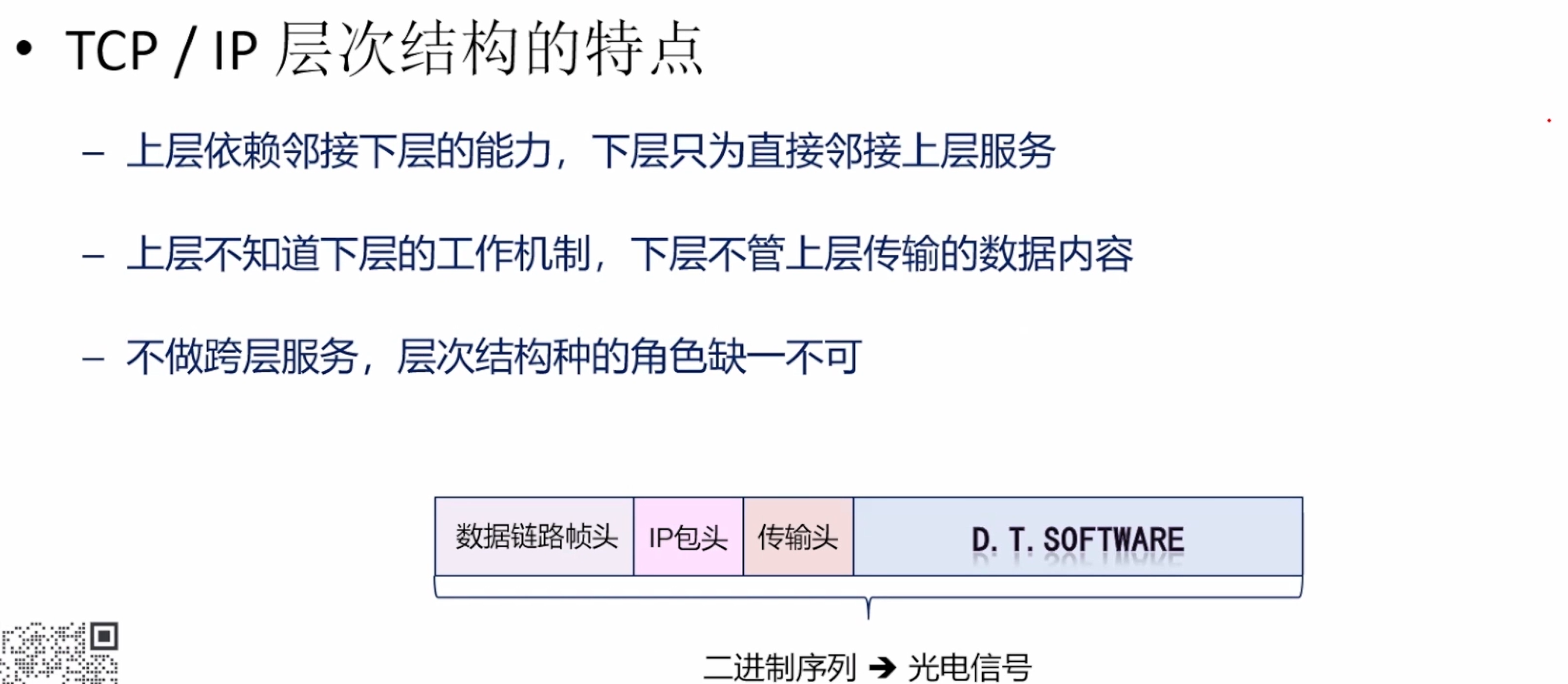
4.OH 设备网络编程可同时使用 TCP 和 UDP 正确
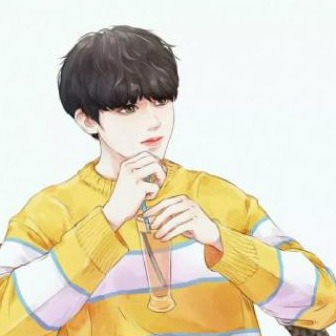
5.网络传输过程中传输层对数据进行分包 正确
6.TCP 相对 UDP 即稳定又高效 错误
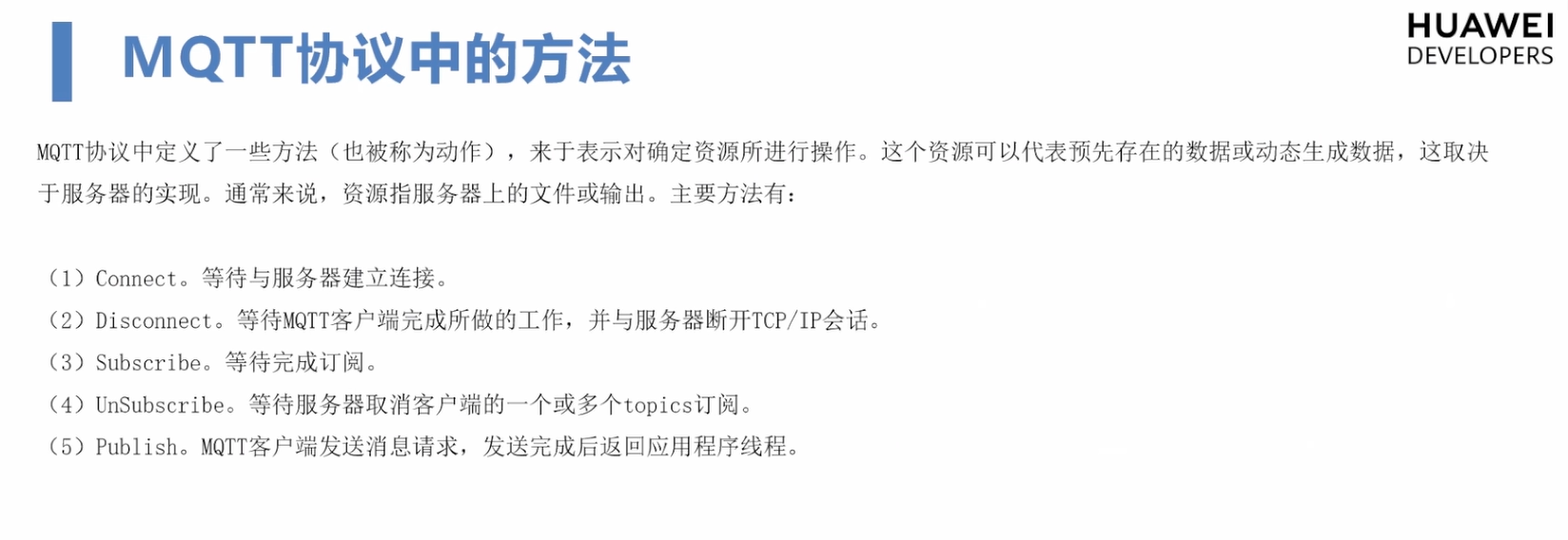
第七讲:OpenHarmony设备MQTT协议开发
判断题
1.paho.mqtt.c 是用Java语言开发的 错误
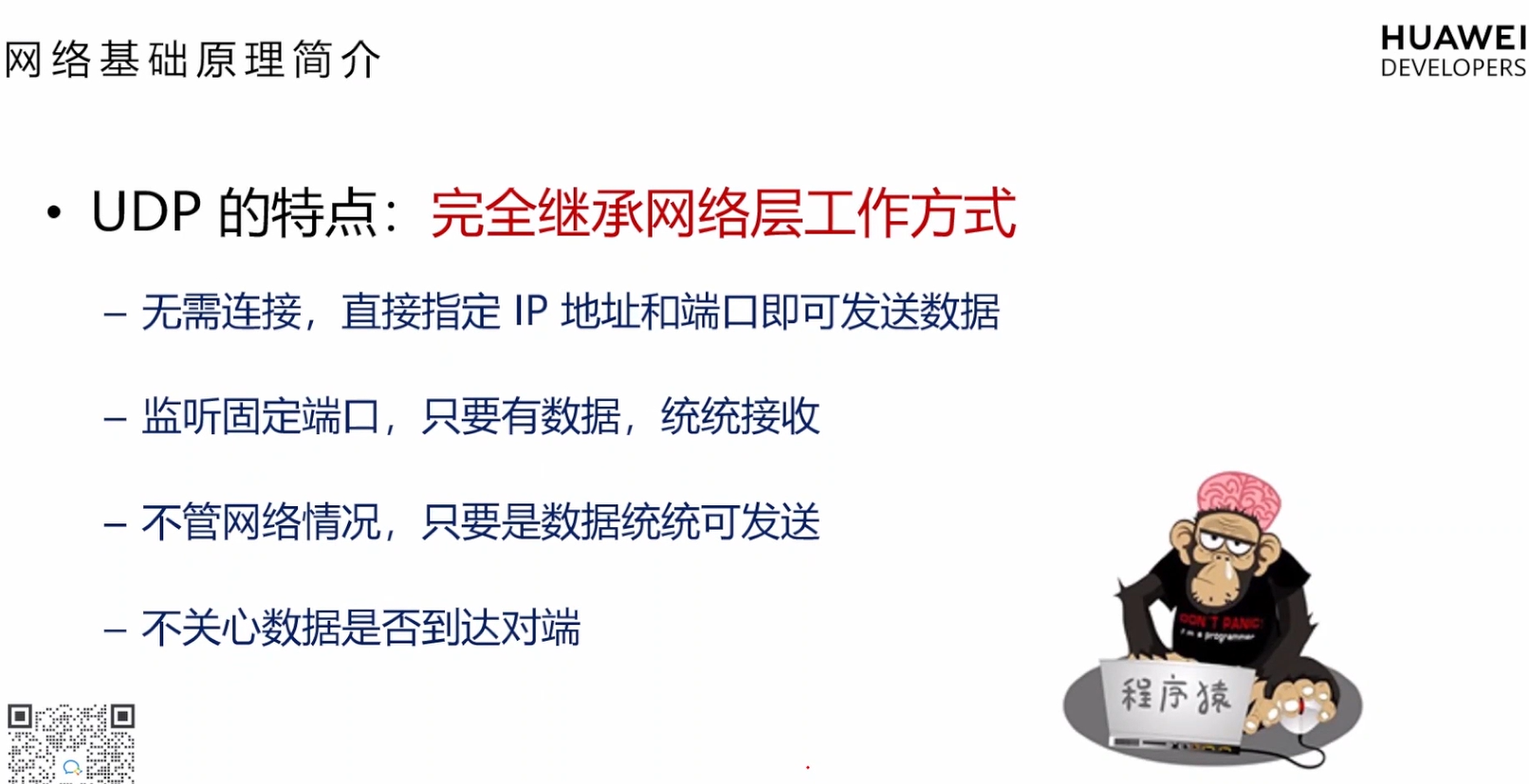
2.MQTT基于客户端-服务器的消息发布/订阅传输协议。 正确
3.Hi3861很难学? 错误
4.MQTT是开源的 正确
5.MQTT发布和订阅都需要先指定主题? 正确
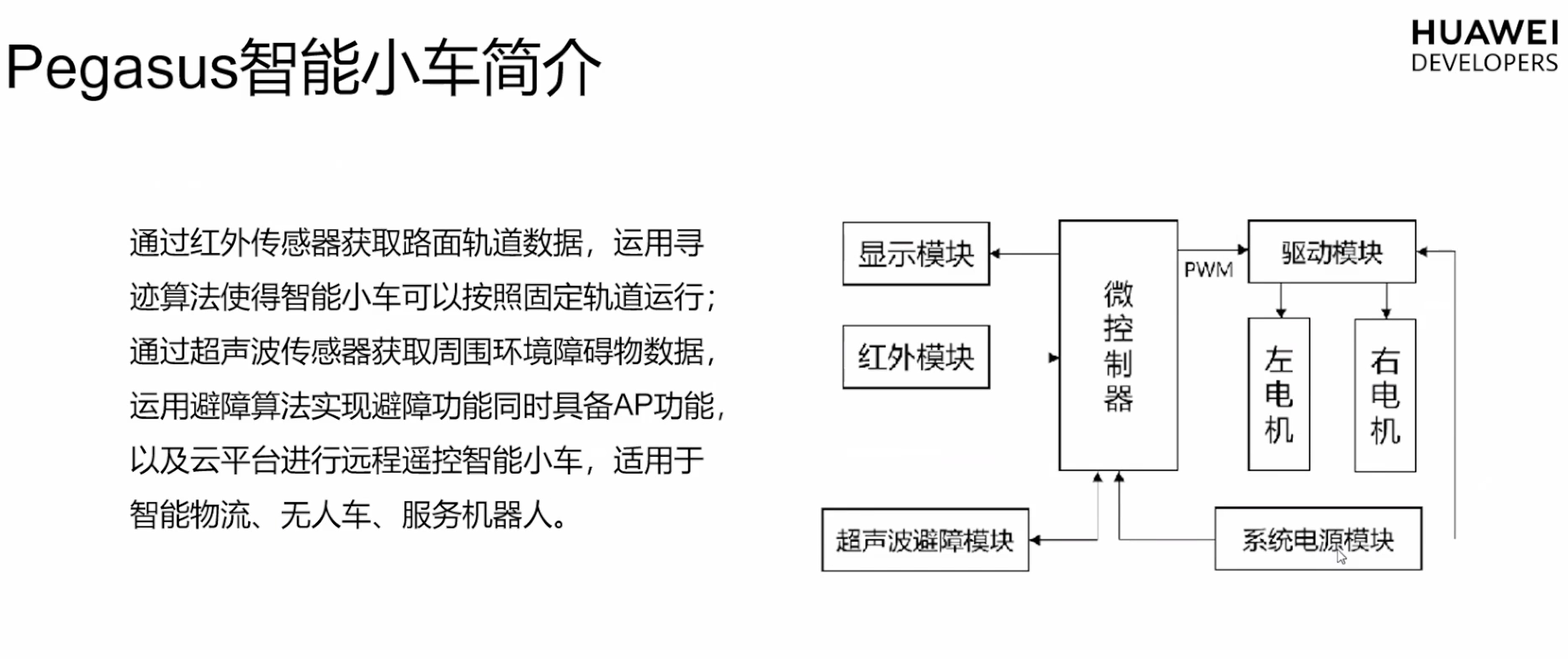
第八讲:OpenHarmony设备开发之机器人小车
判断题
1.本次实验中,SG90舵机使用PWM信号控制速度 错误
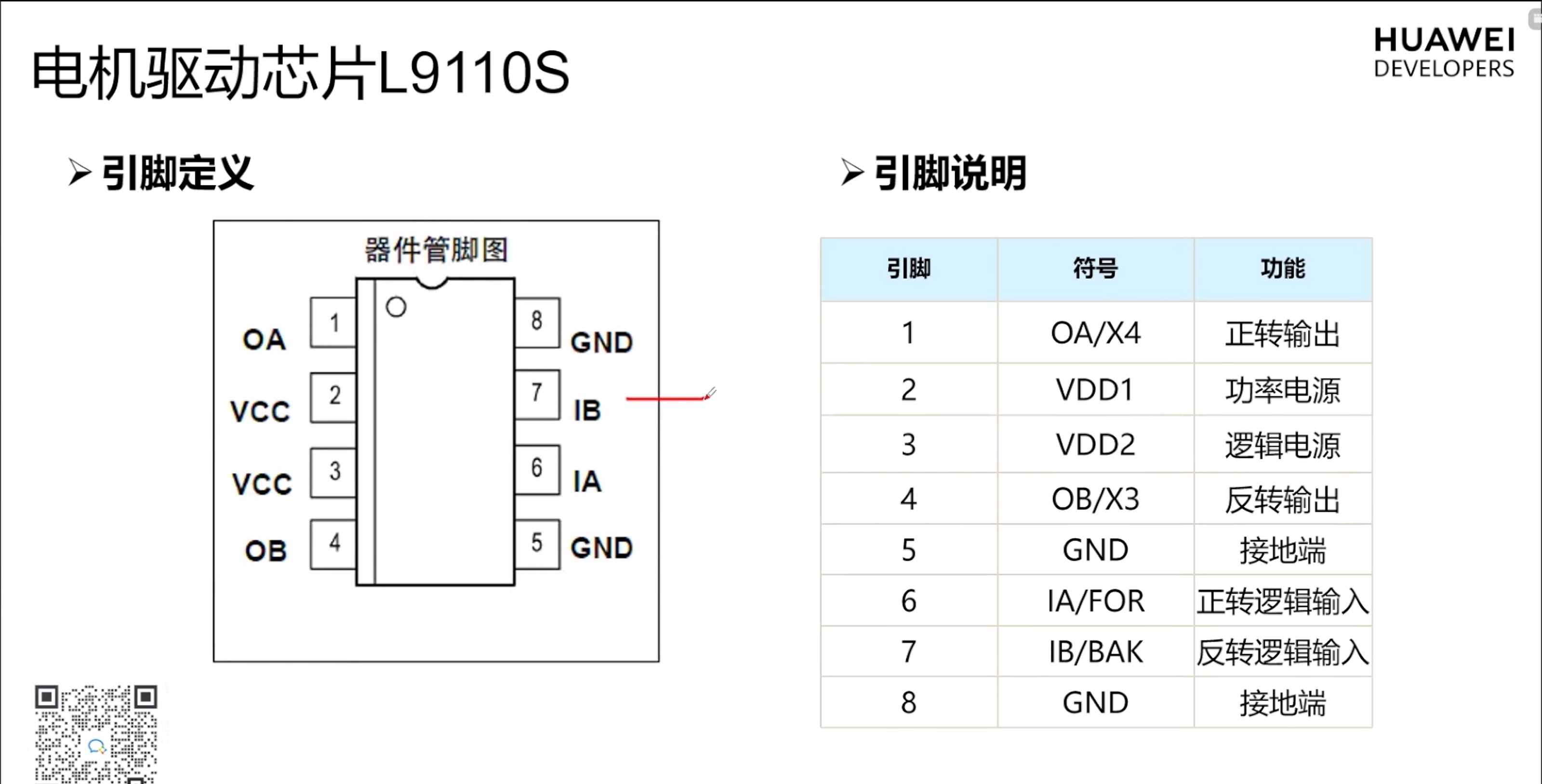
2.本次实验中,L9110S电机使用PWM信号控制速度 正确
3.本次实验中,超声波传感器HC-SR04控制端trig触发测距至少给20μs 错误
4.本次实验中,超声波传感器HC-SR04触发后,若有信号返回,则echo输出低电平
5.红外线传感器TCRT5000原理是利用不同颜色的物体对光的反射能力不同 正确
6.超声波传感器HC-SR04测试距离=高电平时间*声速(340M/S) 错误
7.智能小车开发套件中主控芯片是Pegasus(Hi3861) 正确
8.通过PWM控制两个轮子的速度差来控制小车的运行方向 正确
第九讲:OpenHarmony设备开发学习总结与经验分享
判断题
1.红外线传感器TCRT5000原理是利用不同颜色的物体对光的反射能力不同 正确
2.GPIO端口可以设置用于输出和输入 正确
3.OpenHarmony docker镜像的版本情况可以在其Gitee站点查询。 正确
4.PWM可用于控制LED亮灭的时长 错误
5.通过PWM控制两个轮子的速度差来控制小车的运行方向 正确
6.MQTT基于客户端-服务器的消息发布/订阅传输协议。 正确
7.MQTT发布和订阅都需要先指定主题? 正确
8.OpenHarmony系统类型有轻量系统、标准系统 错误
9.本次实验中,超声波传感器HC-SR04控制端trig触发测距至少给20μs 错误
10.OH 设备网络编程可同时使用 TCP 和 UDP 正确
11.Hi3861带蓝牙 错误
12.Hi3861 ADC按键电压范围:0~3.3V 正确
13.Hi3861开发板上的PWM引脚是专用于PWM的 错误
14.OpenHarmony只支持带屏设备 错误
15.Hi3861属于轻量系统 正确
16.数据链路层就是指网络连接的物理链路通道 错误
17.在使用HC-SR04超声波传感器测试障碍物障碍物时,假设接受端高电平时长为500μs时,测试距离为:8.5cm 正确
18.Hi3861很难学? 错误
19.本次实验中,超声波传感器HC-SR04触发后,若有信号返回,则echo输出低电平 错误
20.Hi3861属于标准系统 错误
21.PWM信号的输出是:占空比不同的高低电平 错误
22.Hi3861的串口可以复用,但作为串口使用时不能控制GPIO 正确
23.Hi3816可使用2个串口 错误
24.docker可以用来快速部署编译环境。 正确
25.ADC不能用于输出模拟信号 正确
26.只要支持socket接口就可以直接使用网络编程框架 错误
27.I2C通信使用的引脚名称有:SDA、SCL 正确
28.samba是用来做文件目录共享的。 正确
29.编译提示宏找不到一般是头文件没有正确包含 正确
30.轻量系统的内核是LiteOS-M 正确
31.本次实验中,L9110S电机使用PWM信号控制速度 正确
32.hb set命令是用来选择设备产品型号的。 正确
33.GPIO端口输出的是0或者1 错误
34.I2C只能用于一对一通信 错误
35.网络传输过程中传输层对数据进行分包 正确
36.hb compile命令是用来编译系统代码的 错误
37.OLED显示屏是一种自带背光的显示屏 错误
38.本次实验中,SG90舵机使用PWM信号控制速度 错误
39.paho.mqtt.c 是用Java语言开发的 错误
40.智能小车开发套件中主控芯片是Pegasus(Hi3861) 正确

- 点赞
- 收藏
- 关注作者
评论(0)