ubuntu 20.04 ROS 环境下 使用 velodyne

【摘要】 ubuntu 20.04 ROS 环境下 使用 velodyne
系统环境配置
安装ROS依赖
sudo apt install ros-noetic-velodyne
成功提示:

安装驱动
git clone https://github.com/ros-drivers/velodyne.git
成功提示:
将功能包考在ros 的工作空间下面,然后进行编译。
catkin_make
硬件连接
找个电源适配器,9-18v给雷达供电。雷达连接其连接器,网口接到ROS的工控机上即可
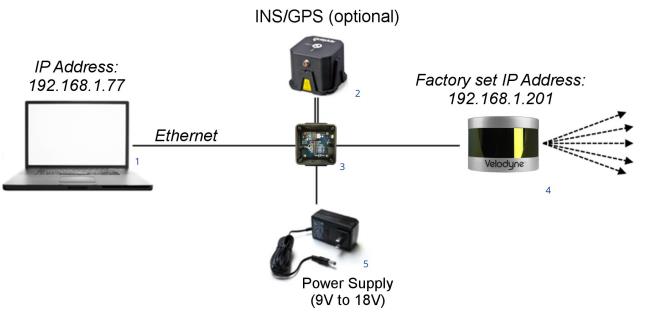
网口配置
将工控机的网口配置为
ipv4,方式设置为手动
ip地址、掩码以及网关设置成下图

其中地址 不能为 192.168.1.201 ,这个是雷达的地址
运行驱动程序
roslaunch velodyne_pointcloud VLP16_points.launch
通过rostopic list查看当前消息名称
rostopic list
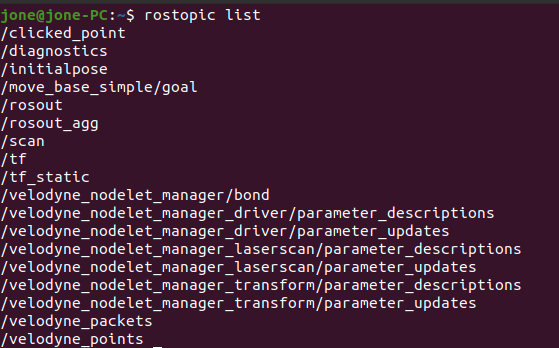
其中 /velodyne_points 就是 激光雷达发布的点云消息。
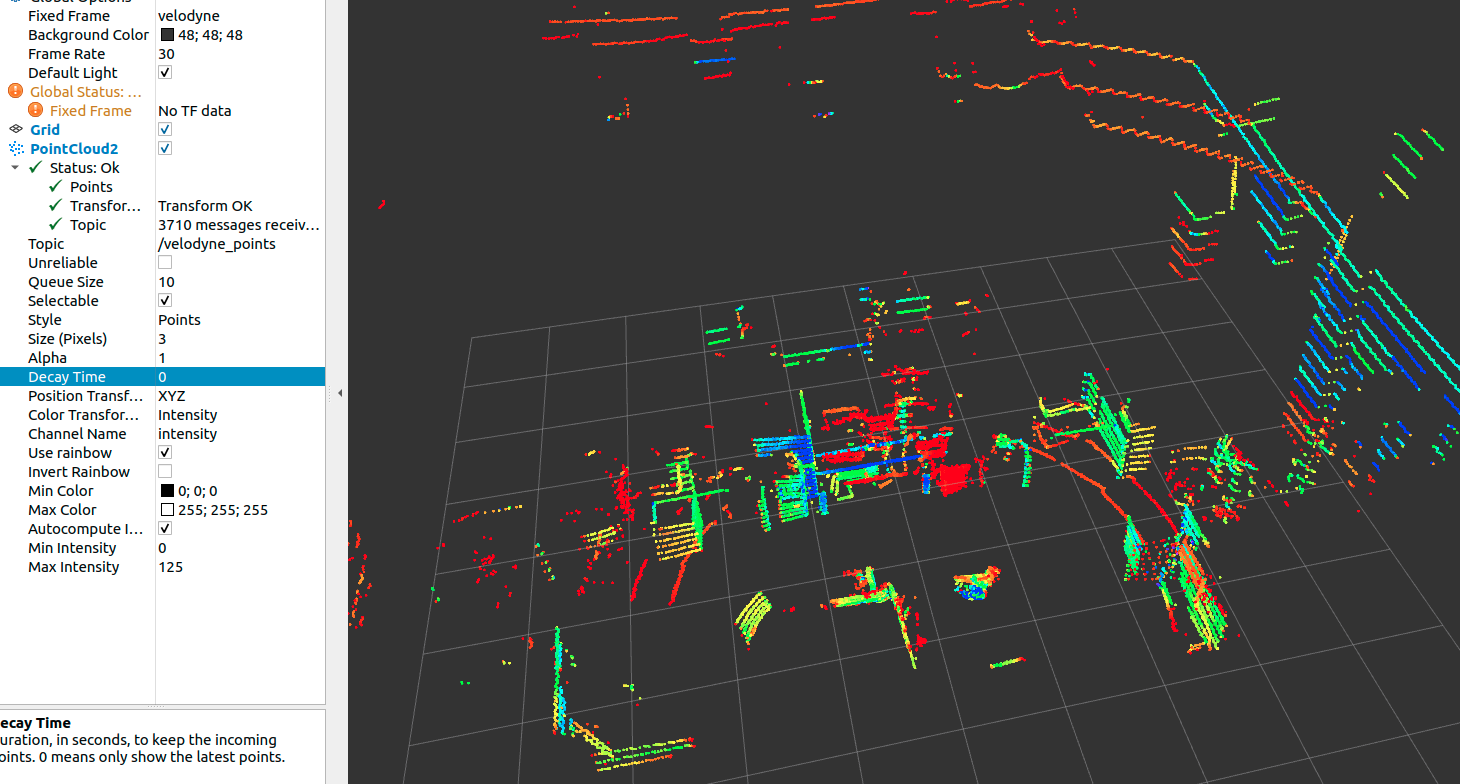
通过rviz可视化点云
终端输入rviz,打开该软件
rviz
Fiex Frame 写入 velodyne
添加 PointCloud2
Topic 选择 /velodyne_points
之后即可看到点云

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)