2022CUDA夏季训练营Day2实践


前情回顾:
2022CUDA夏季训练营Day1实践 https://bbs.huaweicloud.cn/blogs/364478
CUDA训练营第二天上午介绍了CUDA线程层次的概念,下午介绍了CUDA的矩阵乘法的实现。
上午课件记录:
线程层次的概念:
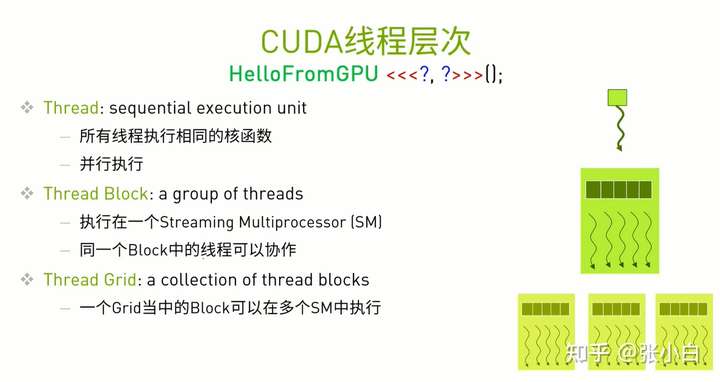
简单说,就是一个grid有多个block,一个block有多个thread.
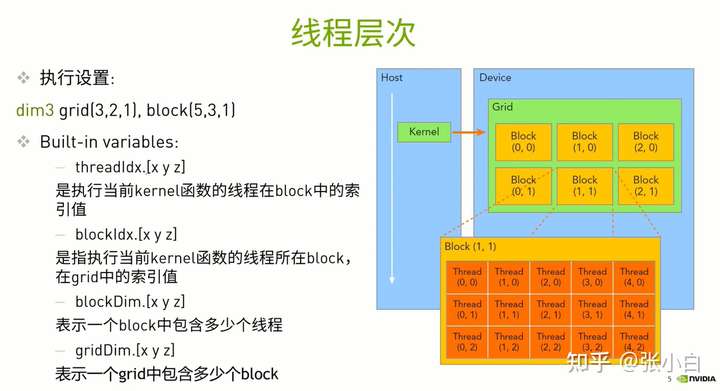
grid有多大,用gridDim表示它有多少个block,具体分为gridDim.x, gridDim.y,gridDim.z。
block有多大,用blockDim表示它有多少个thread,具体分为blockDim.x,blockDim.y,blockDim.z。
怎么表示thread在block中的相对位置呢?用 threadIdx.x,threadIdx.y,threadIdx.z表示。
怎么表示block在grid中的相对位置呢?用blockIdx.x,blockIdx.y,blockIdx.z表示。
顺便解释下昨天提到的 hello_from_gpu<<<x,y>>>(); 中的x和y是什么意思?它们分别表示 gridDim和blockDim。
对于下面这个函数:
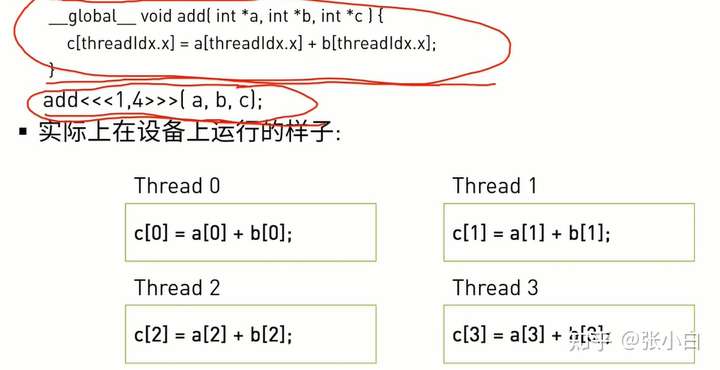
表示gridDim是1,表示grid有1个block,blockDim是4。表示block有4个thread。
所以对于上面的核函数,相当于有4个thread分别执行了 c[n]=a[n]+b[n]的操作,n=threadIdx.x
在调用的时候,所有的CUDA核都是执行同一个函数。这与CPU多线程可能会执行不同的任务不同。
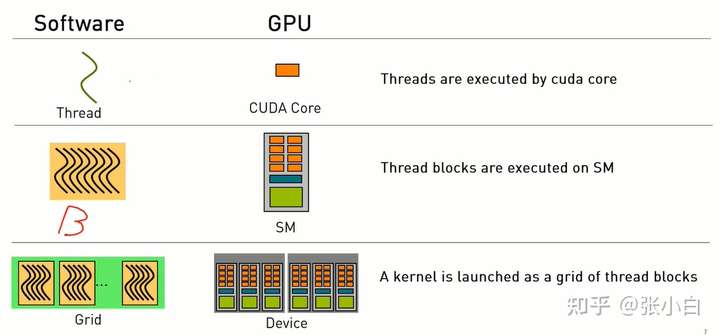
如上图所示,Thread在CUDA core中执行,Block在 SM中执行,Grid在Device中执行。
那么,CUDA是如何执行的呢?看下面这张图:
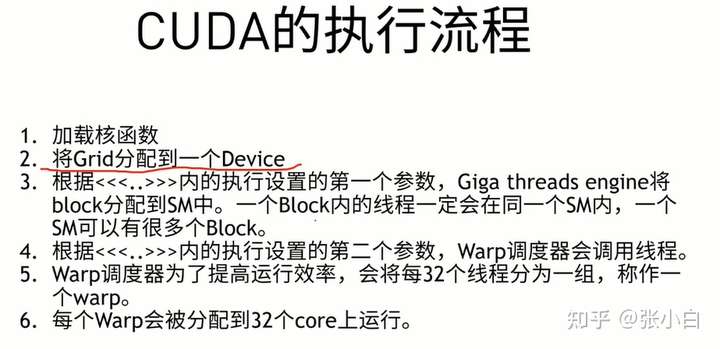
如果没有block的概念,要同时进行同步、通信、协作时,整体的核心都要产生等待的行为,如要进行扩展时,扩展的越多等待也越多。所以性能会受影响。
但是有block的概念后,可以实现可扩展性。用block或warp就可以很容易实现扩展了。
如何找到线程该处理的数据在哪里呢?这就要提到线程索引的概念。
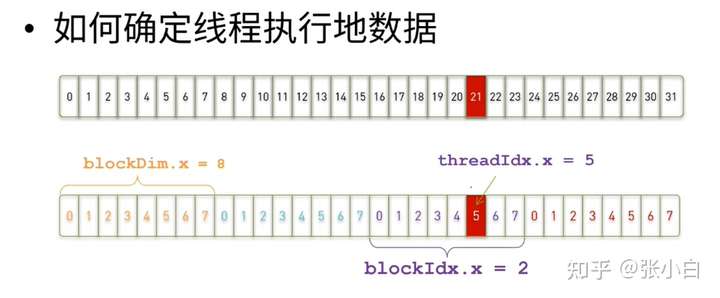
以上:假定每8个thread时一个block。
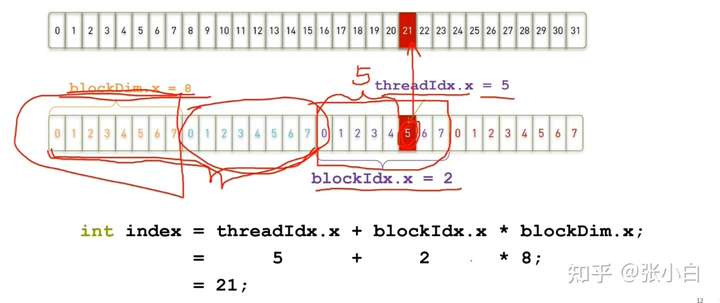
具体的公式如下:
具体的索引位置 index = blockDim.x * blockIdx.x + threadIdx.x
那么一个CUDA程序到底应该怎么写呢?
以将一个CPU实现的代码转换为GPU为例:
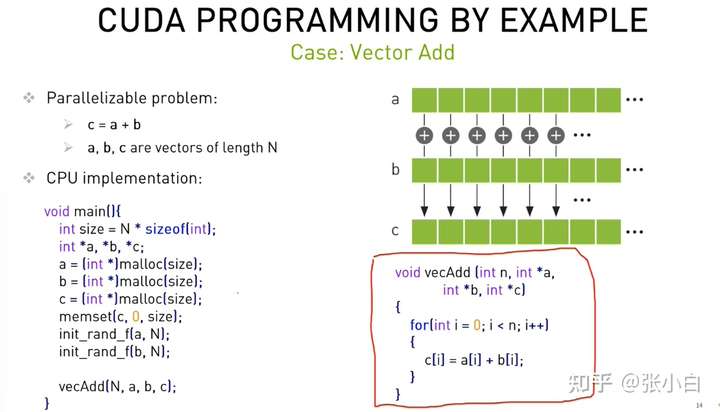
CPU的实现过程大致如下:
(1)主程序main:
先分配 源地址空间a,b,目的地址空间c,并生成a,b的随机数。然后调用 一维矩阵加的CPU函数。
(2)一维矩阵加的CPU函数:
遍历a,b地址空间,分别将 a[i] 与 b[i]相加,写入 c[i]地址。
这个时候,请注意是要显式地进行for循环遍历。
那么,GPU该如何实现呢?
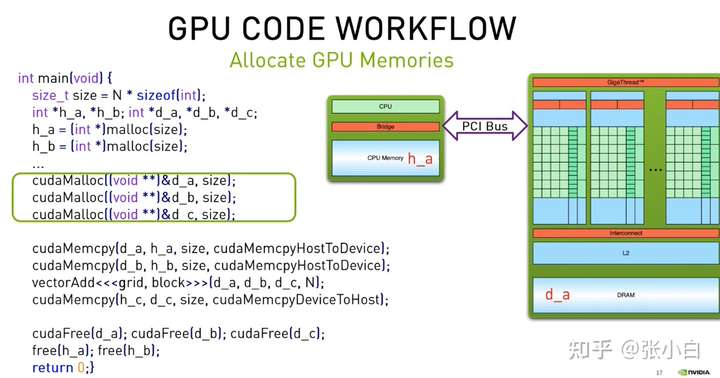
(1)主程序main:
因为GPU存在Host和Device内存,所以先申请host内存h_a,h_b,存放a,b的一维矩阵的内容(也可以生成随机数),并申请host内存h_c存放c的计算结果。
然后申请device内存,这个时候,需要申请 d_a,d_b两个源device内存(cudaMalloc),以及d_c这个目的device内存(cudaMalloc)。将h_a和h_b的内容拷贝到d_a和d_b (显然需要使用 cudaMemcpyHostToDevice);
然后调用核函数完成GPU的并行计算,结果写入h_c;
最后将d_c的device内存写回到h_c(cudaMemcpyDeviceToHost),并释放所有的host内存(使用free)和device内存(使用cudaFree)。
(2)核函数
这里就是重点了。核函数只需要去掉最外层的循环,并且根据前面 的index写法,将i替换成index的写法即可。
如何设置Gridsize和blocksize呢?
对于一维的情况:
block_size=128;
grid_size = (N+ block_size-1)/block_size;
(没有设成什么值是最好的)
每个block可以申请多少个线程呢?
总数也是1024。如(1024,1,1)或者(512,2,1)
grid大小没有限制。
每个block应该申请多少个线程呢?
底层是以warp为单位申请。 如果blockDim为160,则正好申请5个warp。如果blockDim为161,则不得不申请6个warp。
如果数据过大,线程不够用怎么办?
这样子,每个线程需要处理多个数据。
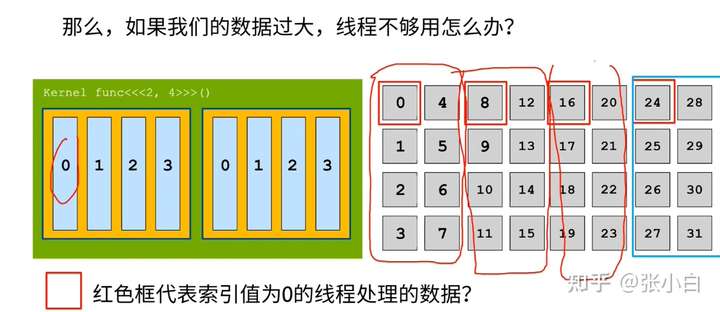
比如对于上图,线程0,需要处理 0,8,16,24 四个数据。核函数需要将每一个大块都跑一遍。代码如下:
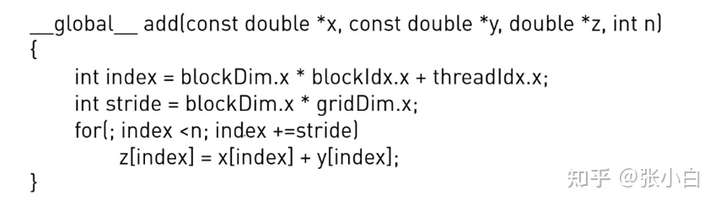
这里引入了一个stride的概念,它的大小为blockDim.x X gridDim.x 。核函数需要完成每个满足 index = index + stride * count对应的相关地址的计算。
上午配套实验:
体验index:
Index_of_thread.cu
#include <stdio.h>
__global__ void hello_from_gpu()
{
//仅仅是在昨天代码的基础上打印 blockIdx.x 和 threadIdx.x
const int bid = blockIdx.x;
const int tid = threadIdx.x;
printf("Hello World from block %d and thread %d!\n", bid, tid);
}
int main(void)
{
hello_from_gpu<<<5, 5>>>();
//记得加上同步,不然结果会出不来。
cudaDeviceSynchronize();
return 0;
}Makefile:
TEST_SOURCE = Index_of_thread.cu
TARGETBIN := ./Index_of_thread
CC = /usr/local/cuda/bin/nvcc
$(TARGETBIN):$(TEST_SOURCE)
$(CC) $(TEST_SOURCE) -o $(TARGETBIN)
.PHONY:clean
clean:
-rm -rf $(TARGETBIN)编译并执行:
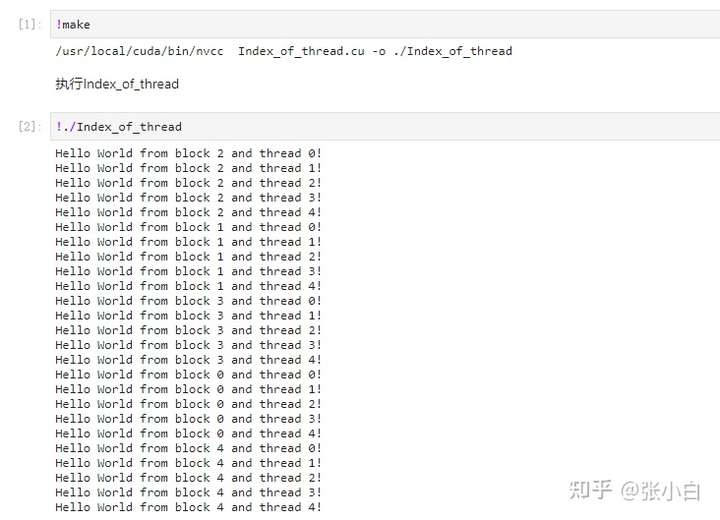
将 gridDim和blockDim改为 33,5,重新编译执行:
将 gridDim和blockDim改为 5,33,重新编译执行:
何老师让我们做这段的意义在于理解“1个warp是32个thread”的概念。有心的人可以通过nvprof分析下以上三个代码运行的速度对比。
完成一维向量计算:add
代码如下:
#include <math.h>
#include <stdio.h>
void __global__ add(const double *x, const double *y, double *z, int count)
{
const int n = blockDim.x * blockIdx.x + threadIdx.x;
//这里判断是防止溢出
if( n < count)
{
z[n] = x[n] + y[n];
}
}
void check(const double *z, const int N)
{
bool error = false;
for (int n = 0; n < N; ++n)
{
//检查两个值是否相等,如不等则error=true.
if (fabs(z[n] - 3) > (1.0e-10))
{
error = true;
}
}
printf("%s\n", error ? "Errors" : "Pass");
}
int main(void)
{
const int N = 1000;
const int M = sizeof(double) * N;
//分配host内存
double *h_x = (double*) malloc(M);
double *h_y = (double*) malloc(M);
double *h_z = (double*) malloc(M);
//初始化一维向量的值
for (int n = 0; n < N; ++n)
{
h_x[n] = 1;
h_y[n] = 2;
}
double *d_x, *d_y, *d_z;
//分配device内存
cudaMalloc((void **)&d_x, M);
cudaMalloc((void **)&d_y, M);
cudaMalloc((void **)&d_z, M);
//host->device
cudaMemcpy(d_x, h_x, M, cudaMemcpyHostToDevice);
cudaMemcpy(d_y, h_y, M, cudaMemcpyHostToDevice);
//这个是公式。记住就可以了。
const int block_size = 128;
const int grid_size = (N + block_size - 1) / block_size;
//核函数计算
add<<<grid_size, block_size>>>(d_x, d_y, d_z, N);
//device->host
cudaMemcpy(h_z, d_z, M, cudaMemcpyDeviceToHost);
//检查结果
check(h_z, N);
//释放host内存
free(h_x);
free(h_y);
free(h_z);
//释放device内存
cudaFree(d_x);
cudaFree(d_y);
cudaFree(d_z);
return 0;
}Makefile-add
TEST_SOURCE = vectorAdd.cu
TARGETBIN := ./vectorAdd
CC = /usr/local/cuda/bin/nvcc
$(TARGETBIN):$(TEST_SOURCE)
$(CC) $(TEST_SOURCE) -o $(TARGETBIN)
.PHONY:clean
clean:
-rm -rf $(TARGETBIN)执行编译:
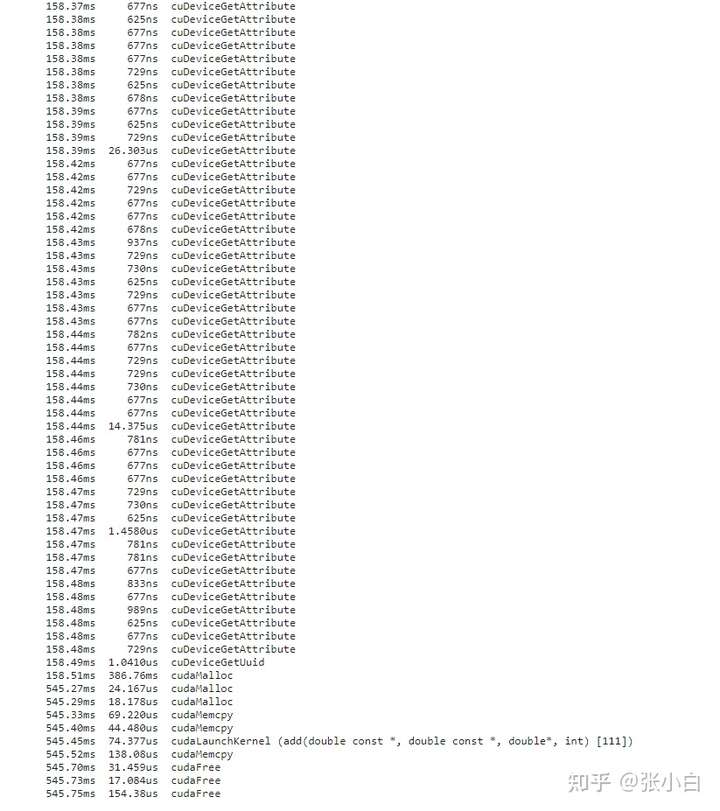
查看性能:
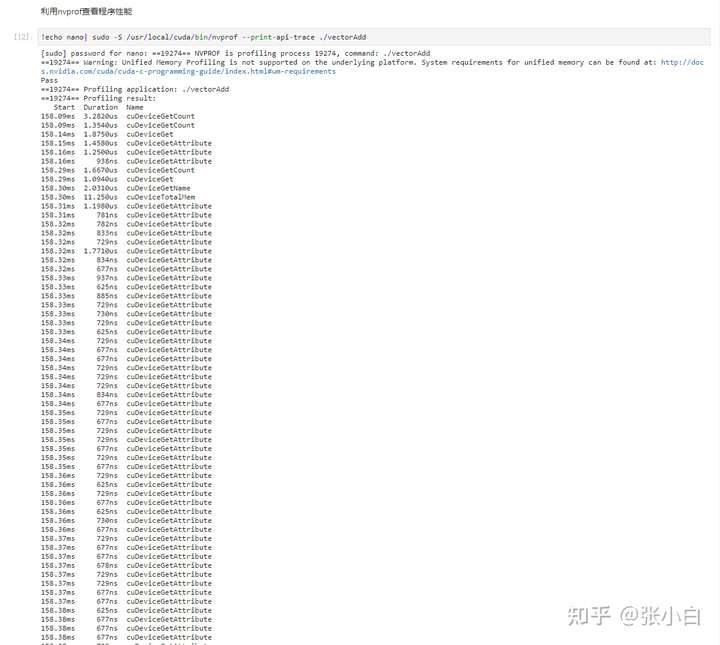
下午课件记录:
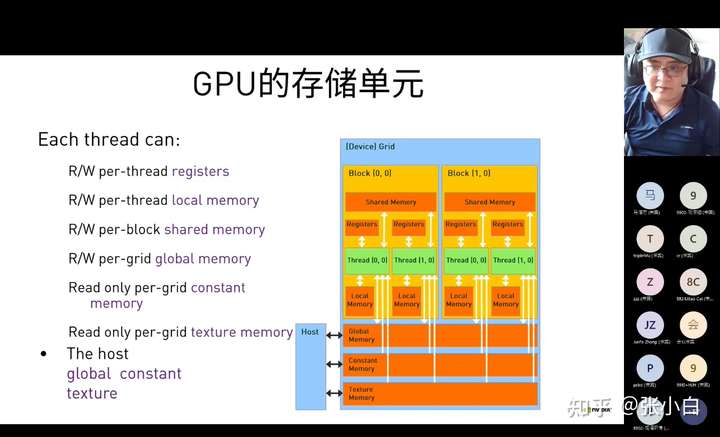
今天介绍global memory,就是GPU的显存。
在GPU上,on-board memory包含以下类型:
- local memory 每个thread一个。线程私有。
- global memory 每个grid一个。每个thread都可以读。
- constant memory 每个grid一个。只读。每个thread都可以读。
- texture memory 每个grid一个。只读。每个thread都可以读。
on-chip memory包含以下类型:
- registers 每个thread一个。线程私有。
- shared memory 每个block一个,一个block下所有线程都可以访问。
HOST内存函数
- malloc 申请
- memset 初始化
- free 释放
DEVICE内存函数
- cudaMalloc 申请
- cudaMemset 初始化
- cudaFree 释放
请注意,这里函数只返回状态。所以分配的内存地址作为函数参数。
HOST《-》DEVICE互相拷贝
cudaMemcpy( 目的内存地址,源内存地址,内存大小,cudaMemcpyHostToDevice/cudaMemcpyDeviceToHost/cudaMemcpyDeviceToDevice/cudaMemcpyHostToHost)
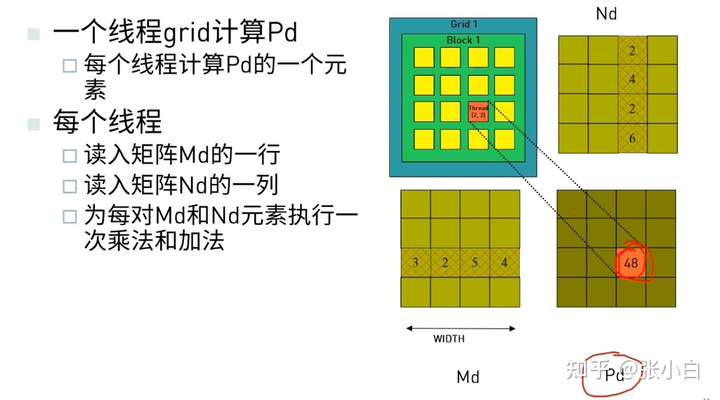
以矩阵乘为例:
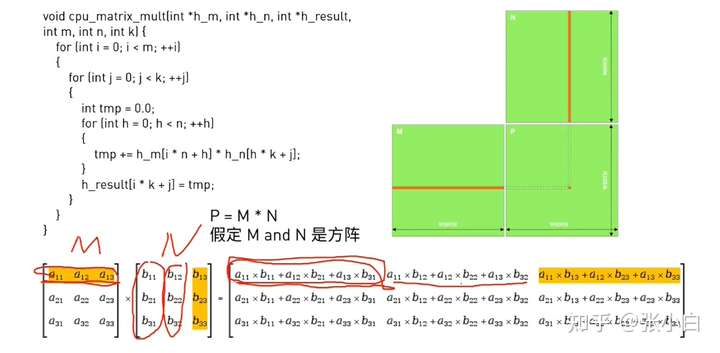
CPU的做法是嵌套循环,如上图所示。
GPU的做法应该是使用 index( blockIdx和 threadIdx的组合公式)替换原来的下标i,j。
这也是一般CUDA程序的套路——把for loop展开成每个线程处理其中的一步。
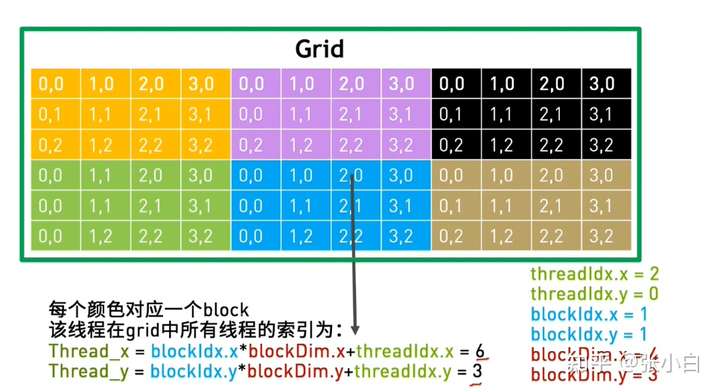
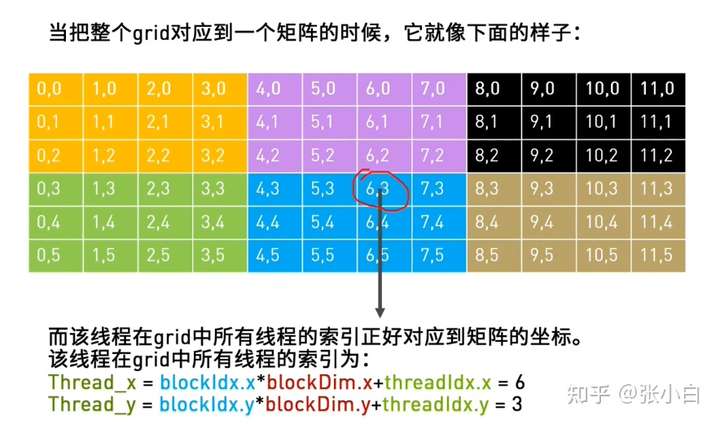
那么,如何使用CUDA将坐标拆开呢?将二维坐标(矩阵)改为 在全局中的索引:需要找到每个线程需要处理元素的位置。
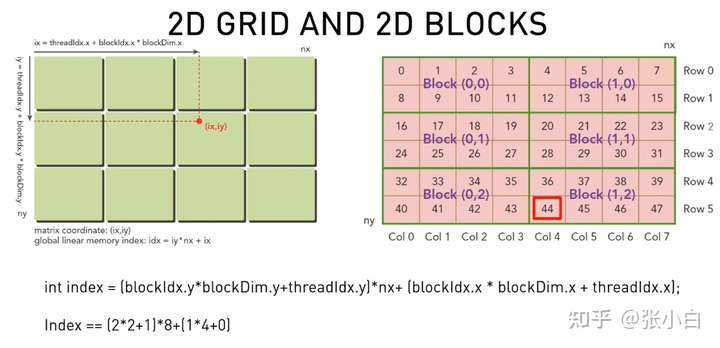
ty=线程在y方向的坐标
tx=线程在x方向的坐标
ty=blockIdx.y*blockDim.y + threadIdx.y
tx=blockIdx.x*blockDim.x + threadIdx.x
nx=x方向有多少数据。
index = ty * nx + tx
目的是将高维降为低维。
矩阵乘的每个核函数的算法如下:
典型的核函数算法代码如下:
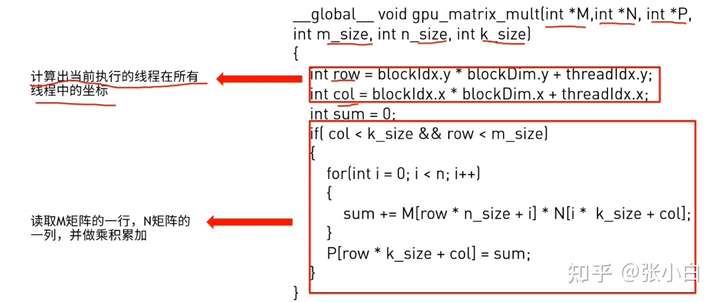
需要注意:
矩阵乘 矩阵M是 mXn,矩阵N是 nXk,这里面需要 矩阵M和矩阵N都有n。否则无法相乘。
上代码:
#include <stdio.h>
#include <math.h>
#define BLOCK_SIZE 16
//使用GPU进行矩阵计算
__global__ void gpu_matrix_mult(int *a,int *b, int *c, int m, int n, int k)
{
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
int sum = 0;
if( col < k && row < m)
{
for(int i = 0; i < n; i++)
{
sum += a[row * n + i] * b[i * k + col];
}
c[row * k + col] = sum;
}
}
//使用CPU进行矩阵计算
void cpu_matrix_mult(int *h_a, int *h_b, int *h_result, int m, int n, int k) {
for (int i = 0; i < m; ++i)
{
for (int j = 0; j < k; ++j)
{
int tmp = 0.0;
for (int h = 0; h < n; ++h)
{
tmp += h_a[i * n + h] * h_b[h * k + j];
}
h_result[i * k + j] = tmp;
}
}
}
int main(int argc, char const *argv[])
{
/* 矩阵A mXn,矩阵B nXk --》矩阵乘计算的结果是 mXk */
int m=3;
int n=4;
int k=5;
int *h_a, *h_b, *h_c, *h_cc;
//分配原矩阵的内存 h是host memory
cudaMallocHost((void **) &h_a, sizeof(int)*m*n);
cudaMallocHost((void **) &h_b, sizeof(int)*n*k);
//分配 CPU结果内存
cudaMallocHost((void **) &h_c, sizeof(int)*m*k);
//分配 GPU结果内存
cudaMallocHost((void **) &h_cc, sizeof(int)*m*k);
//初始化矩阵A(mxn)
srand(time(0));
printf("---------------h_a------------------\n");
for (int i = 0; i < m; ++i) {
for (int j = 0; j < n; ++j) {
h_a[i * n + j] = rand() % 1024;
printf("%d", h_a[i * n + j] );
printf(" ");
}
printf("\n");
}
//初始化矩阵B(nxk)
printf("---------------h_b------------------\n");
for (int i = 0; i < n; ++i) {
for (int j = 0; j < k; ++j) {
h_b[i * k + j] = rand() % 1024;
printf("%d", h_b[i * k + j] );
printf(" ");
}
printf("\n");
}
int *d_a, *d_b, *d_c;
//分配 原矩阵的GPU内存 d是device memory
cudaMalloc((void **) &d_a, sizeof(int)*m*n);
cudaMalloc((void **) &d_b, sizeof(int)*n*k);
//分配 目的矩阵的GPU内存
cudaMalloc((void **) &d_c, sizeof(int)*m*k);
// copy matrix A and B from host to device memory
cudaMemcpy(d_a, h_a, sizeof(int)*m*n, cudaMemcpyHostToDevice);
cudaMemcpy(d_b, h_b, sizeof(int)*n*k, cudaMemcpyHostToDevice);
unsigned int grid_rows = (m + BLOCK_SIZE - 1) / BLOCK_SIZE;
unsigned int grid_cols = (k + BLOCK_SIZE - 1) / BLOCK_SIZE;
dim3 dimGrid(grid_cols, grid_rows);
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
//GPU计算,结果放入h_c
gpu_matrix_mult<<<dimGrid, dimBlock>>>(d_a, d_b, d_c, m, n, k);
cudaMemcpy(h_c, d_c, sizeof(int)*m*k, cudaMemcpyDeviceToHost);
//cudaThreadSynchronize();
//CPU计算,结果直接放入h_cc
cpu_matrix_mult(h_a, h_b, h_cc, m, n, k);
int ok = 1;
for (int i = 0; i < m; ++i)
{
for (int j = 0; j < k; ++j)
{
// 比较大小的时候使用 a-b<0.0000000001
if(fabs(h_cc[i*k + j] - h_c[i*k + j])>(1.0e-10))
{
ok = 0;
}
}
}
printf("---------------h_c cpu result------------------\n");
for(int i=0;i<m;i++)
{
for(int j=0;j<k;j++)
{
//矩阵小的时候还可以打印,大的时候就别打了
printf("%d",h_c[i*k + j] );
printf(" ");
}
printf("\n");
}
printf("---------------h_cc gpu result----------------\n");
for(int i=0;i<m;i++)
{
for(int j=0;j<k;j++)
{
//矩阵小的时候还可以打印,大的时候就别打了
printf("%d",h_cc[i*k + j] );
printf(" ");
}
printf("\n");
}
if(ok)
{
printf("Pass!!!\n");
}
else
{
printf("Error!!!\n");
}
// free memory
cudaFree(d_a);
cudaFree(d_b);
cudaFree(d_c);
cudaFreeHost(h_a);
cudaFreeHost(h_b);
cudaFreeHost(h_c);
return 0;
}代码中张小白加上了注释,已经介绍得比较清楚了。
我们执行下看看:
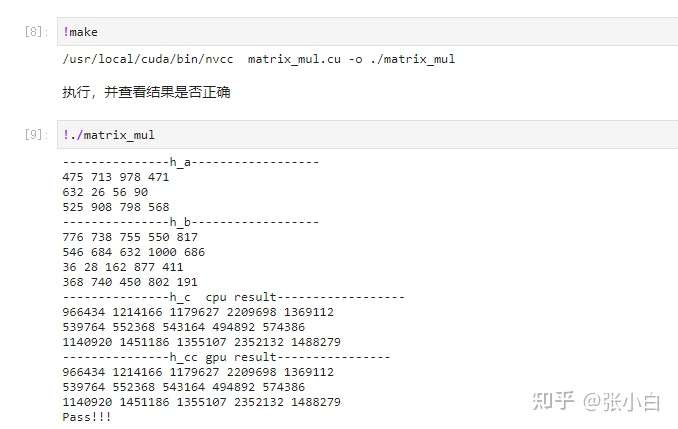
代码以 3X4和4X5的矩阵相乘,得到了3X5的矩阵结果。
这个结果跟CPU计算的结果做了对比。显示Pass表示结果是一致的(其实张小白把两个结果都打印的出来,当然也是一致的)
这里面有个小TIPS,就是在调用rand()生成随机数的时候,可以使用srand(time(0)) 做随机数种子,这样下次调用的时候跟这次生成的内容就会不一样。如果去掉这句话,每次执行的结果都是一样的。
(未完待续)

- 点赞
- 收藏
- 关注作者
评论(0)